| |
|
|
|
|
|
1) Das neu aufzubauende Modell war
ursprünglich ein Experimentalmodell für
Solarflug von
O. Czepa, der damit verschiedene
Auswirkungen von diversen
Änderungen an Tragflächen etc.
erprobt hat. Schließlich waren die Tests
abge-
schlossen und die Reste des Modells landeten
im Lager. Nachdem das Lager
geräumt werden musste, bekam
ich die Möglichkeit, mir diverse Sachen zu
nehmen, die ich gerne haben wollte. Darunter
befanden
sich die Teile des
nachstehend beschriebenen Modells.
Der stabartige Kastenrumpf ist in
Leichtbauweise gebaut. Das Höhenruder
und das
Seitenruder waren unbeweglich, da in einer Halle nur Gleitflüge mit
dem
Modell geflogen und gemessen worden sind. Höhen und
Seitenruder
sind in Brettbauweise mit
Papierbespannung
gebaut. Die nicht zum Rumpf
passenden Tragflächen sind
in Rippenbauweise hergestellt. Künftig wird
die
Tragflächenhalterung vereinfacht und die Flügel mit
Gummiringen auf der
Flügelauflage befestigt.
Technische
Daten "Solong II":
Spannweite: 2000mm, Länge: 1350mm,
Fluggewicht: 860g,
Motor: Joker K 2826-14-V3/1180kV, 240W, Prop: 9x5, Strom: 6,7A
Regler:
Roxxy 25A, Akku: 2 LiIon Zellen, 2900mAh
Fernsteuerung:
MC 24, 35mHz
2) Meine Variophon-
und Telecont Tipp-Fernsteuerungen habe ich haupt-
sächlich
in Modellschiffen verwendet. Dabei lernte ich viel über
die alte
Technik. Zwar flog ich mit
einer Variophon S Anlage bereits einen Graupner
Amateur,
doch erinnere ich mich nur, dass es wegen zu großer
Ruderwege
ein Teufelsritt war, der glücklich
und ohne Bruch zu Ende ging. Daher folgte
die
Anwendung in Schiffsmodellen.
Nun ergab
sich, dass ich ein Variophon 2-Set bekam und nachdem es
funk-
tioniert, möchte ich den Versuch
unternehmen, einen leichten kleinen Schwach-
wind
Hangsegler zu bauen. Dabei sollen Tragflächen eines
"Pulsar" F1E-Seg-
lers zum Einsatz kommen. Ein
Holzrumpf eines kleinen Seglers soll als Auf-
nahme
der Varioton Empfangsanlage dienen.
Problematisch
wird die Größe des Pendler-Empfängers mit zwei
Schaltstufen
(Seite, Höhe) und die zwei
Bellamatc Rudermaschinensein, die im Rumpf
unterzubringen
sind. Gewichtsbezogen schlägt sich allerdings die
Stromversor-
gung des Empfängers mit 6V und
2,4V zu Buche, doch werde ich einen spezi-
ellen
Akku bauen, bei dem von den 6V aus zwei Zellen 2,4V
entnommen werden.
Technische
Daten vom Segler "Varioton":
Spannweite: 1850mm,
Länge: 950
mm, Fluggewicht: ?g,
Fernsteuerung: Graupner
Variophon 2 / Varioton, Empfangsanlage,
Empfänger Akku:
6V mit 2,4V Abzapfung für Rudermaschinen
3) Ein
Modell mit guten Voraussetzungen und niedrigem Kaufpreis
gilt als bes-
sere Basis für den Versuch mit
der Tipp-Steuerung. Der "Phönix" von Volantex
ermöglicht
die Erhöhung der V-Form, die für den Kurvenflug eines
Zweiachs-
Flugmodells wichtig ist, da die
Flügel auf Stahlstiften aufgesteckt werden. So war
und
ist das bei vielen Modellen üblich. Allerdings ist der
Bausatz ohne Servos
ausgestattet, was den
Einbau der Varioton Empfangsanlage ermöglicht. Klar ist,
dass
der Kunststoffrumpf nicht unzerstörbar ist und bei den
ersten Flugversuchen
Vorsicht gebiten ist.
Insgesamt sind die aerodynamischen Voraussetzungen bes-
ser
als bei meinem Eigenbau-Projekt Varioton.
Technische
Daten "Phönix":
Spannweite: 2400mm,
Länge: 1130mm, Fluggewicht Originalversion: 1160g,
Fernsteuerung:
Graupner Variophon 2 / Varioton, Empfangsanlage,
Empfänger Akku:
6V mit 2,4V Abzapfung für Rudermaschinen
Schwerpunkt
75mm +/- 5mm
|

Solong II
Flugvideo

Solong im Flug

die Variophon 2 Tipp-Steuerung mit 27,12mHz
Funktionsvideo Variophon 2

die Empfangsanlage ist einghebaut

bereit zum Einfliegen

Das Ausgangsmodell
Volantex Phoenix
|
|
Die Bauberichte meiner
Experimental Segelflugmodelle |
Der
Umbaubericht "Solong II"
Begonnen
wurde damit, dass die ehemalige Tragflächenaufnahme für
andere Testflächenund
das Blei
auf der Unterseite des Rumpf es
entfernt wurden. Danach wurden die beschädigten Stellen des Höhen
und Seitenruder neu bespannt.
Anschließend konnte mit der Revision der Flügel begonnen
werden,
wobei auf einer Tragfläche das Tragrohr
in den Flügel hineingeschoben war, aber herausgezogen und
neu
eingeklebt werden musste.
Da die Flügel nicht
zu der ehemaligen Tragflächenbefestigung am Rumpf passten, wurde
dieser Aufsatz
vom Rumpf entfernt. Nun war der
Zeitpunkt gekommen, an dem zu entscheiden war, wie es
mit dem
Experimentalmodell weiter gehen könnte.
Der Entschluss ergab, dass der Flieger als
ferngesteuerter,
elektrisch angetriebener
Leichtwindsegler
eingesetzt werden soll.
Gewichte
der Einzelteile vor dem Umbau
Rumpf:
98g, Hlw+Slw: 22g, 2 Flügel: 338g,= gesamt: 458g
erste
Abwaage zwischendurch
Rumpf mit
Leitwerken, Servos und Motor: 230g
Abwaage
nach Erstflug
Gesamtgewicht: 755g ,
(letzter Flug: 860g)
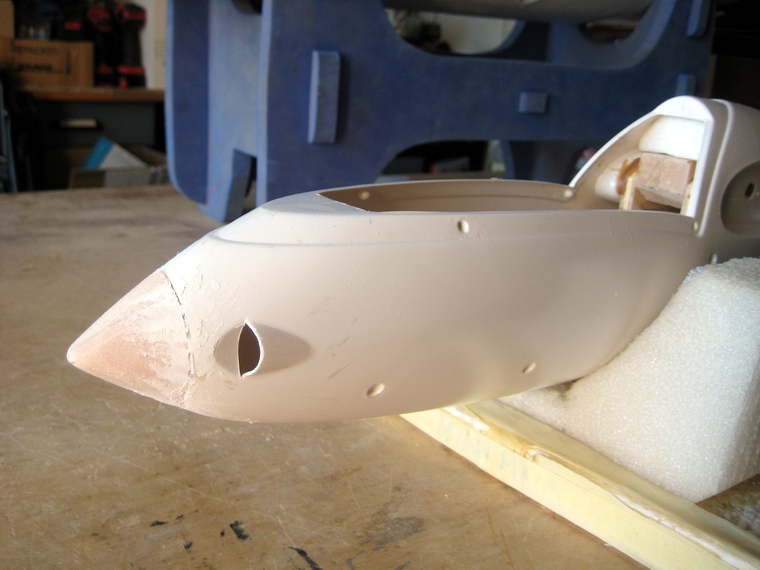
Rumpfarbeiten
Dazu ist der
EInbau zweier 5g-Servos im Rumpfheck vorgesehen, um
die jetzt steuerbaren Seiten- und
Höhenruder
zu bewegen. Das
Rumpfvorderteil musste um einige Zentimeter gekürzt
werden, damit ein
kleiner Außenläufer E-Motor angebaut werden kann. Zur Befestigung des
Motors wurden vier 30mm
lange Hartbalsa-Dreikantleisten
in die Rumpfecken geklebt. An diesen
Eckleisten wird der Motor mit-
tels Montagekreuz und mit
passenden Holzschrauben angeschraubt. Mit einer Öffnung
kurz nach dem
Motor am Rumpfoberteil wurde die
Möglichkeit geschaffen, den Akku, den Regler und den
Empfänger
im Rumpf unterbringen zu können. Ein Reisenauer
Spinner mit einer 5mm Wellenbohrung und 38mm
Durchmesser wurde am Ende der Umbauten am Rumpf montiert.
Das
Leitwerk
Bei
dem Modell war das ehemals verwendete Höhen und
Seitenleitwerk dabei. Beide Teile sind fix und
mussten
zum steuern des Modells umgebaut werden. Beim
Höhenleitwerk wurde auf der linken Seite eine
Ruderklappe
ausgeschnitten und mit Scharnierband angeklebt.
Weiters wurde das Servo in der Seiten-
ruderfinne eingebaut
und mit einem kurzen Gestänge mit der Ruderklappe
verbunden. Es sind +/- 2mm
Ruderweg möglich.-
Das Seitenruder wurde an die Seitenruderfinne angepasst
und mit zwei Polyester-
scharnieren gelenkig
eingerichtet. Je Seite können etwa 45°
Ausschlag gesteuert werden. Elektrisch
werden die
beiden Servos mit einer 0,14²-Leitung im Rumpfinneren
angeschlossen.
Der An- und Abbau des
Höhenruders ist eine sehr heikle Arbeit, es sollte aber wegen der
filigranen
Ausführung zum Transport abgenommen
oder speziell vor Schäden gesichert
werden.
Flügelauflage
Um mir die Arbeit zu erleichtern, wählte
ich eine einfache Flügelauflage, bei der die Tragflächen
mit ihrer
V-Form aufliegen und mit Gummiringen
am Rumpf befestigt werden. Dazu wurden vier Balsateile mit
V-Form-Abschrägung hergestellt und mittig
zusammengeklebt, sodass eine Auflage für die vordere
oder
hintere Flügelkante zustande kommt.
Um die Flügel gemäß dem Schwerpunkt am Rumpf
zu positionieren, wurde der Rumpf mit komplettem
Leitwerk, samt Akku, Regler und Empfänger,
aber ohne Propeller händisch ausgewogen. An der Stelle
wo der Rumpf in der Waage war, wird der Flügel
mit dem angegebenen Schwerpunkt (62mm ab Nasen-
leiste)
angeordnet und die V-Form-Auflagen mit
Doppelklebeband aufgeklebt (damit sie noch verschoben
werden können). Auf den Auflagestücken wurde
vor der Nasen- und nach der Endleiste ein Balsastücke
aufgeklebt, die zur genauen Einortung der
Tragfläche dienen.
Die Befestigung der
Flügel erfolgt mit 2 Stk. 10mm x 110mm x1mm Gummiringen.
Der Flügel sitzt richtig
am Rumpf, wie der
optische Vergleich mit dem Höhenruder zeigte.
Fertigstellung
und Flugvorbereitungen
Die Einstellung des Schwerpunktes kann
erst nach der Montage eines Spinners erfolgen. Um den
Schwerpunkt ohne Bleizugabe zu erreichen,
musste für die notwendigen Teile der richtige Platz
gefunden
werden. Im Voraus wurde eine
Möglichkeit gesucht, dass der Empfänger im Rumpf nahe
der Nasenleiste
untergebracht wird und der
LiIon-Stangenakku im vorhandenen Rumpfausschnitt
nach hinten eingescho-
ben wird und dabei im
vorderen Bereich auf dem Regler zu liegen kommt. Im
Rumpf ist es nun eng ge-
worden, denn die Kabel und die
großen Stecker füllen den Raum im Rumpf vollständig aus.
Der Akku und
die Stecker werden mit dem
ausgeschnittenen Deckel verschlossen und vorläufig mit
einem Gummiring
verschlossen gehalten.
Die
realisierte EInbausituation des in den Rumpf
eingeschobenen Empfängers ist etwa in der Nähe der
Nasenleite.
Vor dem Empfänger liegt der Stangenakku. Dessen Schutz
gegen Verrücken nach hinten er-
folgt so, dass
ein Bowdenzugröhrchen mittig durch
den Rumpf geschoben wird. Das Röhrchen kann ent-
fert werden, damit der Empfänger bei Bedarf
herausgezogen werden kann.
Die
Erprobung des Motors
Nach der
Montage des Spinners wurde der Motor getestet. Die
Erwartungen wurden leider nicht erfüllt,
denn der
kleine Motor ist eben klein und schwach. Der gefühlte
Motorzug sollte aber ausreichen, das
leichte Modell in
flachem Steigflug in die Höhe zu bringen. Besser wäre
wohl ein Getriebemotor gewesen,
doch der war mir für
dieses Experimentalflugzeug zu teuer. Die gemessene
Stromaufnahme beträgt 6,7A
(12A Motormax.)
Erste
Flüge
Bei
nahezu Windstille wurde das Modell eingeworfen, wobei
der ungesteuerte Wurf auf Kopflastigkeit hin-
gewiesen
hat. Dennoch wurde der erste Flug gestartet, wobei der
Segler sehr gemächlich und flach in die
Höhe stieg.
Um im Horizontalflug zu bleiben, reichte die volle
Höhenrudertrimmung gezogen nicht aus und
der
Flieger
musste ständig gezogen geflogen werden. Die Erreichung
größerer Höhe als 50m bedarf lan-
ger Motorlaufzeit,
wenn keine Aufwinde mithlefen. Bei 7,6A max.
Stromaufnahme ist der 2900mAh Akku
lange als Energiespender
verwendbar. Die Steuerung des Seitenruders funktioniert
gut und das Modell
lässt sich auch in engen
Kurven fliegen. Die abschließende Landung verlief
erfolgreich.
Nach Erhöhung detr EWD
erfolgte am Folgetag ein neuerlicher Flugtest. Diesmal
steig das Modell ohne
ziehen zu müssen von
alleine, jedoch dann so stark, dass der Motor an seine
Leistungsgrenze kam und nachgedrückt
werden musste. Nachdem eine ausreichende Flughöhe
erreicht war, wurde das Fluggebiet
erkundet,
ob irgendwo Aufwinde bestehen. Um einen horizontalen
Flugzustand zu erreichen, musste auch
diesmal
die volle Höhentrimmung hochgeschaltet werden. Damit
kam nahezu ein Horizontalflug zustande.
Die
Windgeschwindigkeit an dem Tag lag bei 3m/Sek , also
kein starker Wind. Während des Abflieges
des Geländes
sollte wieder der Motor eingeschaltet werden, doch es
kam kein Steigflug zustande. Mit der
vorhandenen
Flughöhe war es möglich, wieder näher heran zu fliegen,
doch dabei kam es zu starken
Pumpbewegungen,
die kaum abzufangen waren und zum Verlust an Flughöhe
führten. Schon etwas näher
herangekommen, konnte
ein neuerleicher Pumper des Modells nicht abgefangen
werden, worauf es am
Boden aufschlug.
Reparatur
und Ursachenforschung
Der
Grund für die kaum aussteuerbaren abrupten
Pumpbewegungen dürften ein Reichweitenverlust des
Empfängers
sein, so war der erste Gedanke zu dem Fehlschlag. Schon bei der Erprobung in der Garage
fiel auf,
dass bereits nach 15m Entfernung die Ruder zu zucken
begonnen haben, was nicht überragend
gut ist.
Jedoch
bei der Reparaturarbeit am Höhenruder und beim EInbau
eines 2,4 Ghz Jeti-Empfängers zwi-
schen den
Flügelauflagen fiel
auf, dass das Pumpen einen anderen Grund
haben könnte. Es zeigte sich
bei den damit
zusammenhängenden Funktionstetst, dass der Motor nur bei der ersten
Einschaltung mit
Vollast lief, bei nachfolgenden
Einschaltungen
nur ganz langsam. Daher wird es so gewesen sein, dass
ich den Motor einschaltete, der aber mangels
Leistung kaum Steigen brachte. Wegen der Entfernung
konnte ich die Motorgeräusche nicht hören und
abschätzen und zog das Modell, um die Steigleistung zu
erhöhen. Das
führte zum Überziehen des Modells und damit zu den Pumpaktionen, die dreimal hinter-
einander, mit
abnehmender Höhe der Abfangversuche, schließlich zum
Aufschlag
führten.
Hätte ich das Modell ausgleiten lassen,
wäre wohl kaum ein Schaden entstanden. - Die Fehlersuche
ergab, dass offenbar der 9.-€ billige No Name-Regler
schadhaft war und ein anderer eingebaut
werden
musste. Um
beim nächsten Flugversuch besseres Gleiten zu erreichen, wurde
nochmals die EWD erhöht.
Neue
Flüge
Nach den Reparaturen
wurden zwei Flüge am Mollmannsberg erfolgreich
durchgeführt. Bei schwachem
Wind mit ca. 3m/sek
und mit windstillen Fasen, erfolgte der erste Start
gegen den Wind. Das Modell
stieg im Winkel
von ca. 30° und mehr, wodurch es zum Überziehen kam.
Durch Zurücknahme der Leistung
flachte der Steigwinkel
ab und das Modell stieg mit gehaltenem
Tiefenruderausschlag schön in die Höhe.
Nach Abschaltung des Motors begann ein angenehmer
Gleitflug. Das halbe Höhenruder wirkt ausrei-
chend gut, ebenso das Seitenruder. Die Höhenrudertrimmung
in Neutralstellung reichte bei den vorherr-
schenden Windverhältnissen nicht aus, um die Höhe
halten zu können. Mit voller Hochtrimmung ist der Flug
ohne viel Zwischendurch-Ziehen wunderbar
möglich. In einer Thermikfase stieg der Solong auf
geschätzt
120m und weiter, sodass ich mit vorsichtigem
Drücken in weiten Kreisen, die Höhe abbauen konnte.
Die
Landung gelang während einer Flaute und
endete fast vor den Füßen.
Beim
zweiten Start wurde der Ruderweg des Tiefenruders um 20%
erhöht, wodurch Überziehungen aus-
gesteuert
werden können. Bei diesem Flug wurde wieder eine große
Höhe erreicht und diesmal versucht,
mit voller
Tiefenrudertrimmung aus der Thermik herauszufliegen. Das
gelang ohne kritischer Flugzustände.
Die Landung
erfolgte gezogen und weich, jedoch einige Meter
entfernt.
Zusammengefasst ist beim Fliegen
zu beachten, dass nur ein flacher Steigflug von etwa 20°
geflogen
werden soll, wobei mit dem Höhenruder
angepasst tief gesteuert werden muss. Um bei schwachelm
Wind
die Höhe halten zu können oder leicht zu
steigen, genügt es, die volle Höhenrudertrimmung
einzustellen.
Um aus einer Aufwindzone
gefahrlos herausfliegen zu können, genügt es die
HR-Trimmung voll auf Drük-
ken zu stellen. Das Flugverhalten des Modells ist hervorragend und eher
langsam, mit einem Wort ein
Opa-Flieger. Versuchsweise
wird die Empfehlung von Hr. Czepa umgesetzt, und
die EWD auf 3,5°
(bis 5°) erhöht.
Dritter
Flugversuch
Vom Konstrukteur
des Modells bekam ich nach einer Beschau einige Tipps,
was für die Verbesserung
des Modells sinnvoll
wären. Die EWD erhöhen (geht bis 5°) und die 9x6
Propellerblätter montieren. Gesagt,
getan, der
Start war ungemütlicher ausgefallen. Zog der Motor jetzt
so viel mehr? und reichte das Ausmass
des Tiefenruderweges
nicht? Im Gleitflug hat sich die Vergrößerung der EWD
insofern positiv ausgewirkt,
dass jetzt die
Höhe mit der Trimmung in Neutral gehalten werden konnte.
Nach einem fast 25 Minütigen
Flug kam es wegen
Unterfliegung des Geländes zur einem kurzen
Empfangsausfall. Das Gas geben führte
zu einem nicht mehr
sichtbaren Überziehen des Modells und durch das
ungesteuerte Pumpen zu einem Ab-
sturz außer Sicht.
Die Teile konnten wieder gefunden werden und war
erfreulich, dass die Reparatur leicht möglich war.
Nachdem
die Flüge immer ohne Helfer erfolgten, konnten keine
Videoaufnahmen gemacht werden. Gerade
hier wäre
es interessant gewesen zu sehen, wie langsam das Modell
gegflogen werden kann.
Reparatur
Die
Bruchstellen des Rumpfes wurden mit Sekundenkleber
geklebt und mit Verstärkungen aus 0,6mm
Sperrholz
beklebt. Auch an der Rumpfsitze wurden Verstärkungen
aufgeklebt und eine neue Motorverklei-
dung angefertigt.
Weiters wurde auf Hinweis von Hr. Czepa der Motorsturz
drastisch vergrößert. Man wird
sehen ob dadurch
das Überziehverhalten im Steigflug verbessert wird. Die
abgebrochenen Flügelenden
wurden
wieder angeklebt
und die Flügel danach ausgewogen. Zuletzt wird der
Schwerpunkt neu eingestellt,
damit der Solong II wieder
einsatzbereit ist. Das Fluggewicht beträgt
jetzt 860g (vorher 755g). Der 9x5
Propeller wurde wieder montiert.
Nächsten Experimente und der Phönix siehe nach
dem Bilderblock.
|
|
Bau des Experimental
Seglers "Solong II" |
 |
 |
 |
 |
|
der Rumpf ist gekürzt |
Ansicht der Tragflächen und Rumpf |
das Flügelprofil |
die Form der Tragflügel |
 |
 |
 |
 |
|
Ansicht Höhen- und Seitenruder |
Motorbefestigungen eingeklebt |
der Motor ist montiert |
Ansicht auf die Eckleisten |
 |
 |
 |
 |
|
der Regler passt hinein |
das HLW mit halberr Ruderklappe |
|
das Höhenruderservo |
 |
 |
 |
 |
|
|
Seitenruderservo |
und so sieht das Leitwerk aus |
provisorisch adaptiertes Modell |
 |
 |
 |
 |
|
provisorisch adaptiertes Modell |
|
Farbmarkierungen |
alles was in den Rumpf hinein muss |
 |
 |
 |
 |
|
Regler, Akku und Stecker haben Platz |
Ansicht des Rumpfes |
Motor mit Prop und Spinner |
Anschlag für Akku |
 |
 |
 |
|
|
Ansicht der Flügelbefestigung |
die Motorverkleidung
|
neue Organisation im Rumpf |
|
 |
|
 |
|
|
nach dem Erstflug |
|
|
endlich fliegt der Solong II super |
 |
 |
 |
 |
|
Absturz Mollmannsberg |
Rumpfschaden |
|
geklebt mit Verstärkung |
 |
 |
|
|
|
repariert mit Verstärkungen |
der Solong ist wiedser einsatzbereit |
|
|
|
|
|
|
|
|
Die Idee vom Bau des Experimental
Seglers "VariotonI" |
Versuch Experimental
Segler "Varioton" - Modell für eine Variophon 2
Tipp Fernsteuerung
Ausgehend von der Verfügbarkeit einer
Tipp-Fernsteuerung entstand die Idee, die Steuerung in
einen
Leichtwindsegeler einzubauen. Weiters
gab es eine Tragfläche eines F1E-Segelflugmodells,
welches
ich verwenden wollte. Anfangs fehlte
ein barauchbarer Rumpf aus Holz, in den die
Empfangsanlage
passt. Meine Suche nach einem
brauchbaren Rumpf war aussichtslos,
daher muss ich wohl selbst einen
bauen. Doch das dauert noch, da andere
Projekte laufen....
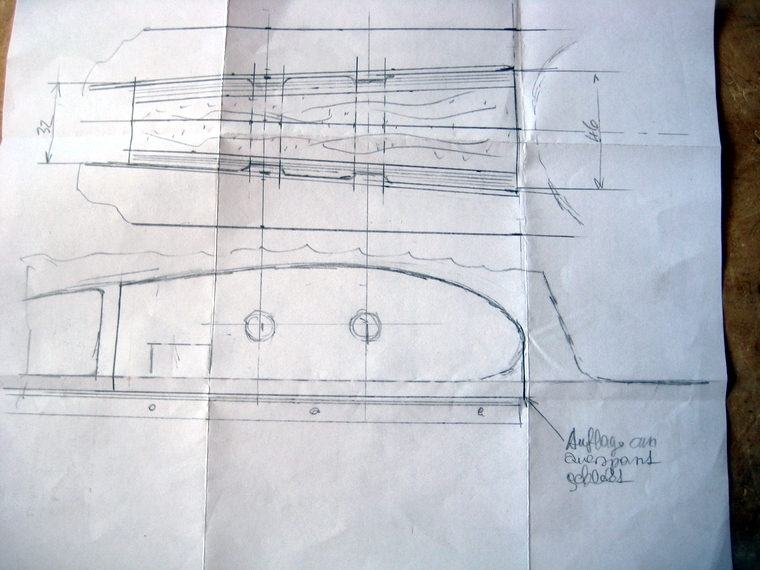
Um den Rumpf zu bauen
wurde ein Plan angefertigt. Der Rumpf wird aus 2mm
Balsabrettern gebaut,
wobei der Boden im
vorderen Teil aus 2mm Sperrholz hergestellt wird. In den
Eckbereichen werden
2mm Leisten eingeklebt,
damit die Ecken abgerundet werden können. Im Bereicht
der Empfangsanlage
werden die Innenseiten im
Rumpf mit 1mm Sperrholz verstärkt. Der Rumpf hat vorne
einen Querschnitt
von 50x50mm und verläuft zum
Heck hin auf 30x30mm.
Die Rumpfspitze wird aus
vier verleimten 25x25mm Balsa Leistenstücken hergestellt
und rund verschliffen.
Die Rumpfoberseite ist
die durchgehend eben und dient als Auflage für das
Höhenruderbrett und das
Seitenleitwerk. Sie
hat eine Öffnung die den Zugang zur Empfangsanlage
ermöglicht.
Die Tragfläche wird im Winkel von
2,5° angestellt und mit Gummiringen am Rumpf befestigt.
Dadurch
kann die zarte Fläche bei ungünstiger
Landung vom Rumpf abgleiten.
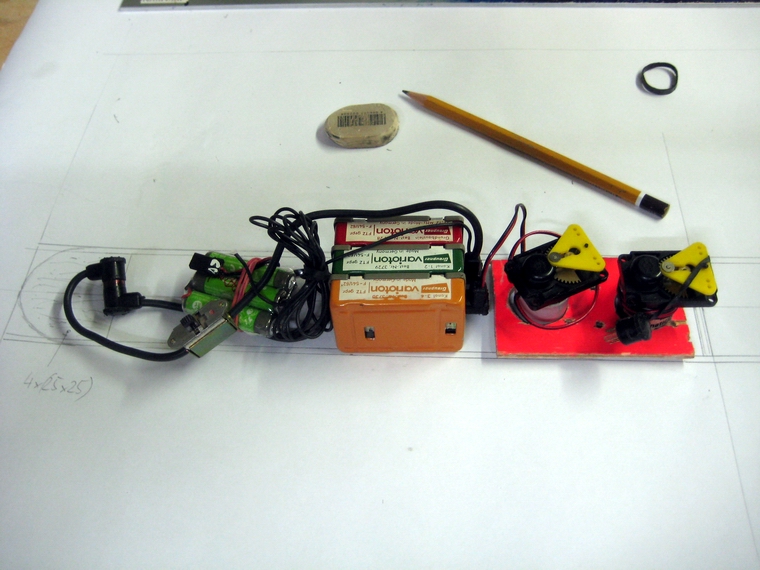
Zwischendurch wurde
überlegt, welche Teile der Empfangsanlage verwendet
werden müssen. Das sind:
Pendler-Empfänger,
die Schaltstufen 1 und 2, das Schalterkabel und der Akku.
Beim 6V Empfänger-Akku werden zur
Einsparung eines zusätzlichen Akkus, von zwei Zellen des
Akkus
2,4V für die Rudermaschinen
entnommen.
Einzelgewichte der
Empfangsanlage: 6V 850mAh-Akku: 71g, Schalterkabel:
19g, 2 Bellamatic Ruder-
maschinen: 75g,
Empfänger mit 2 Schaltstufen: 115g,
Gesamt: 276g
Um
den Rumpf bauen zu können wäre der Ankuf von
Balsabrettchen und Leisten erforderlich geworden.
Zusätzlich
wäre die Beschaffung zweier Tafeln
Flugzeugsperrholz 1 und 2mm notwendig geworden. Die
Kosten
dafür sind nicht überwältigend, doch das Ergebnis des
Baues des Rumpfes und die aerodynami-
schen
Eigenschaften sind unsicher.
Die Suche nach einem gebrauchten, für den
Versuch geeigneten Modell, eventuell Airfisch
(um teure
120.- €) verlief nicht erfolgreich. Damit
ist diese
Variante gestorben und wird daher nicht umgesetzt.
Allerdings
konnte ich ein Angebot eines modernen Segelflugmodells
aus EPP Schaum und mit einem
Kunststoffrumpf finden, wo ich ein neues und
aufzubauendes Segelflugmodell um 95.-€ bekomme. Ich
werde daher den Versuch unternehmen, dieses
Modell mit der einfachen Tipp-Anlage auszustatten.
Darüber wird nachstehend berichtet.
|
|
|
|
|
|
|
|
 |
 |
 |
|
Variophon 2 Tipp-Fernsteuerung |
die Tragfläche in einem Stück |
|
|
 |
 |
 |
|
|
die Skizzen für den Rumpfbau |
|
|
|
|
|
|
|
|
|
Bau des Experimental
Seglers "Phönix" |
Experimental
Segelflugmodell "Phönix" und der Einbau einer Variophon 2
Tipp Fernsteuerung
Nachdem ich mir vorgenommen habe, die
Variophon 2 Tipp Fernsteuerung in einem Segelflugmodell
einzubauen und zu erproben, kaufte ich einen
Bausatz des ARF-Elektro Segelflugmodells Phoenix von
Volantex.
Ob dieses Projekt erfolgreich endet wird sich zeigen.
Da
das Modell vielfach erprobt und als gut fliegend
beschrieben worden ist, sind die Voraussetzungen
für den EInsatz der alten Variophon Steuerung
günstig. Die Frage nach der EWD, dem Schwerpunkt,
etc.
ist hier bereits vorgegeben und entfällt langes Kopfzerbrechen
darüber.
Meine Phönix-Variante ist für
einfachen Hangflug
vorgesehen. Das erfordert ein wenig Wind und einen
kleinen Hang, um zu sehen, wie das Modell
fliegt uind wie es sich mit der Tipp-Anlage steuern
lässt.
Spannend und hoffentlich weniger
stressig wie der Flug mit dem
Graupner Amateur sollte
es werfden.
Dieses Modell ist mit modernen EPP-Flügeln aufgebaut
die Querruder
und Wölbklappen haben. Diese
Klappen werden
künftig
nicht verwendet und fixiert. Ein Kunsstoffrumpf ist
vorhanden, der wir ein GFK-
Rumpf aufgebaut
ist. Im Rumpf befinden sich bereits Brettauflagen auf denen
Teile der Empfangsan-
lage befestigt werden
können. Der Einbau eines E-Motors
entfällt und kann zum Gewichtsausgleich die
alte und schwere
Varioton Empfangsanlage
dienen.
Nach Überlegungen, wie
bestimmte Änderungen am Bausatz durchgeführt werden
können, begann
die Arbeit am
Experiment-Phönix
Das
Konztept für den Umbau zum Zweiachs Segelflugmodell
Eine Lösung für die Verwedung des Modells als
Zweiachs Segler war zu finden. Einfach ist es, die
V-Form der Fragfläche zu
erhöhen, doch müssen dazu die im Bausatz eingearbeitete
geraden Stahl-
rohre und die Flügelbefestigungen der Tragfläche erheblich
geändert werden. Dazu müssen im Rumpf
Führungsrohre für die
gewinkelte Stahlstifte massiv und fest im Rumpf eingeharzt
(Stabilit) werden.
Dadurch können die abgewinkelten Stifte im Rumpf und in den
vorhandenen, abgelängten Flächen-
rohren eingeschoben
werden. Die abgelängten Flächenrohre werden in
den Formrohren in den
Trag-
flächen genau geführt.
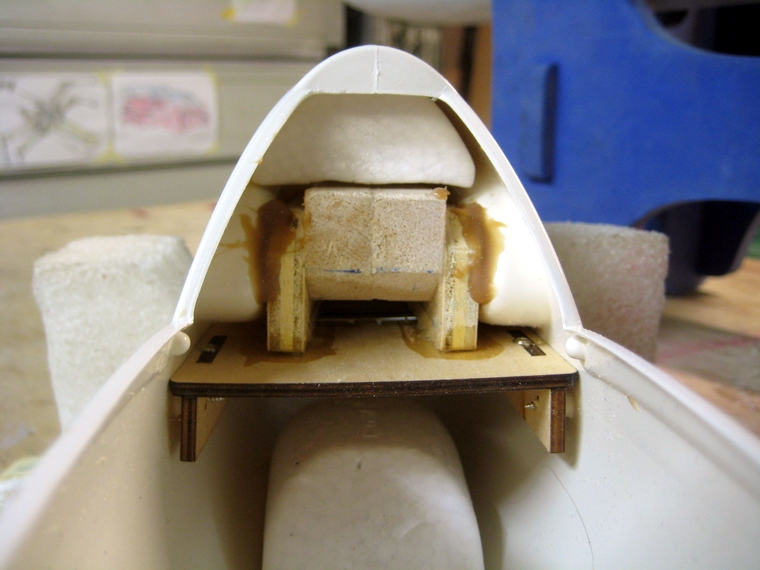
Die künftige
Tragflächenbefestigung
Um die
Flächenrohre im Rumpf stabil zu befestigen wurden zwei
20mm Hartbalsaleisten zusammen-
geleimt, in die
notwendige Form gebracht und mit den Bohrungen versehen.
Um die Kräfte der Stahl-
winkel zum Rumpf gut
abzufedern, wurden beidseits an der Innenseite im Rumpf
8mm Sperrholzteile
mit den Bohrungen
aufgeharzt (Stabilit). Im gleichen Arbeitsgang wurde das
Mittelstück aus Hartbalsa
auf die Sperrholz
Seitenteile aufgeleimt. Diese Seitenteile stützen sich
zusätzlich auf der im Rumnpf
eingebauten Verstärkungsplatte
ab. Noch während der Aushärtung wurden die bereits
abgelängten
Rohrführungen eingepresst.
Die
Wurzelrippen der Flächenhälften mussten abgeschliffen
werden, um der V-Form zu entsprechen.
Die originalen
Flügelhalterungen (Klipse) können wegen der V-Form nicht mehr
eingreifen und musste
eine Anpassung
vorgenommen werden. Durch das Abschleifen der
Wurzelrippen wegen der
V-Form
konnten die Flügelhalterungen näher
zum Rumpf gelangen. Durch vorsichtiges Aufbiegen der
Halter in
den Flügeln können sie nun die Flügel am
Rumpf halten.
Um eine ausreichende V-Form
zu erreichen, wurden die 5mm Flächenstahlstifte
entsprechend abge-
winkelt. Die bein
Bausatz vorhandenen Alu Rohre mit den CFK-Rohreinlagen
wurden verwendet.
Damit die 5mm Stahlstifte in
die CFK-Rohre passen, mussten diese aufgebohrt werden.
Das war eine
heikle, Geduld und Zeit fordernde Arbeit.
Mit den kurzen Flächen-Einschubrohren aus Aluminium wird
es notwendig sein, auf den 8mm Rohren etwas
aufzubringen oder sie in den Quadratrohren in den
Flü-
geln einzukleben.
Die
Schwerpunktlage wird zum Thema
Der
Schwerpunkt ist essentiell für den einwandfreien Flug
des Flugmodells wichtig. Infolge des Um-
baus des
dreiachsigen Elektro-Seglers auf einen Zweiachssegler
(nur Seiten- und Höhenruder) mit
Verwendung
der alten Tipp-Fernsteuerung, ergibt sich eine andere
Anordnung der Empfangsanlage.
Im Modell werden
üblicher Weise am Rumpfheck Nano-Servos (9g) für das
Höhen- und Seitenleitwerk
eingebaut, was mit den
schweren Bellamatic Rudermaschinen (je 33g) nicht
möglich ist. Es muss die
herkömmliche Lösung
mit Rudermaschinen im Cockpit und mit Bowdenzügen angewendet
werden.
Die relativ schwere Empfangsanlage kann im Rumpfbug
untergebracht werden, weil der sonst dort
angeordnete
Motor nicht eingebaut wird.
Dennoch wurde eine
erste Überprüfung der Gewichtsverteilung vorgenommen.
Dazu musste das Leit-
werk zusammengebaut und
provisorisch am
Rumpf befestigt werden. Ebenso wurden die Tragflächen
angesteckt. Danach konnte die Empfangsanlage
im Rumpfbug untergebracht und der Rumpf an der
Stelle des Schwerpunktes angehoben
werden.
Das Heck erwies sich dabei als schwer, was bedeutet,
dass
im Rumpfbug Blei eingelegt werden muss, um den vorgegebenen Schwerpunkt zu erreichen.
Nach EInbau der Empfängertragplatte im
Rumpf wurde für die Rudermaschinen eine Halterung
gebaut.
Danach konnten die Bowdenzüge
eingeklebt werden. Im nächsten Schritt wurde die
Befestigung für die
Empfangseinheit und den
Akku eingebaut.
Um zu sehen, wieviel Blei in
Rumpfbug eingelegt werden muss, wurde das Modell auf die
Schwerpunkt-
waage gelegt. Mit etwa 90g Blei
konnte die leichte Kopflastigkeit bei den Markierungen auf den
Flügeln
bei 75mm, - dem auch in der BA angegbenen
Schwerpunkt -, erreicht werden.
Rudermaschinen
und Ruderwege
Nach der Montage des
Leitwerks konnten die Bowdenzüge auf die erforderliche
Länge gebracht und an
den Rudern und den
Rudermaschinen befestigt werden. Die nachfolgende
Funktionskontrolle ergab er-
nüchternd geringe
Ruderausschläge. Trotz Einhängens an den innersten Bohrungen
blieben die Ruder-
ausschläge klein und
betragen je ~15 Grad. Zwar sind
die Ruderflächen groß doch ist unklar wie deren
Wirkung
sein wird. Eine Rudermaschine musste getauscht
werden, da sie zu schwach war, um die End-
position des Höhenruders zu erreichen.
Flugerfahrungen
und notwendige Anpassungen
Beim konstruktiv mit der richtigen EWD und der
zugehörigen Angabe des Schwerpunkts gefertigten Mo-
dell,
kann man davon ausgehen, dass das Modell fliegt. Bezogen
auf die geringen Ruderausschläge
wird sich
zeigen, ob und wie das Modell reasgiert und so beim Hangflug
eingesetzt werden kann.
Meine nur geringen
Erfahrungen bezüglich der dort unangenehm großen
Ruderausschläge beim Graupner
AMATEUR (nur +/- 4mm Ausschlag
an der Ruderkante), sollte der Flugversuch klappen. Fest
steht, dass
dazu ein mäßiger Wind im rechten
Winkel den Hang anblasen muss. Noch vor einem
Flugversuch am
Hang muss der Segler
eingeworfen und auf besten Gleitflug eingetrimmt werden.
Der erste Flugtest bei Null Wind war nicht
erfolgreich. Es scheiterte an einem guten Wurf, bei dem
ich mit
meinen müden Beinen nicht nicht die,
für einen ordentlichen Gleitflug erforderliche
Fluggeschwindigkeit
aufbringen konnte. Auch ein
zweiter speerwurfartiger Versuch war zu schwach und der
Segler ging nach
etwa 10m sanft im hohen Gras
nieder. Beide "Landungen" erolgten ohne Beschädigung.
Im
aufkommeden Wind versuchte ich, den Segler an den
vorhandenen Schwerpunkt Marken on den Flü-
geln
zu unterstützen. Dabei zeigte sich Schwanzlastigkeit!
Das
Steuern mit dem kleinen Variophon Sender ist ulkig und
gewöhnungsbedürftig. Zwar kann ich mit
der
Linken die Taster für das Höhenruder gut erreichen, muss
aber auch den Sender gut festhalten. Und
bis
die Wurfhand nach dem Wurf am Senderknüppel angelangt
ist, dauert zu lange. In der Zeit ist das
Modell schon
gelandet.
Daheim angekommen wurde das Modell
neuerlich ausgewogen. Das ergab eine notwendige
Bleizugabe
von 70g (insgesamt jetzt 160g) mit der
sich die Rumpfnase nach unten neigte.
Wie
man im Internet sehen kann, ist das
Modell ist nicht für langsame Schleichflüge konstruiert,
sondern
braucht eine etwas höhere Fluggeschwindigkeit,
damit die Aerodynamik voll funktioniert. Das veranlasste
mich zur Spekuation, dass das Modell mit der
Tipp-Steuerung am Hang verwendbar sein müsste. Meine
ersten Einflugversuche fanden bei nahezu
Windstille statt und sind somit nicht sehr aussagekräftig.
Voraussetzung für einen guten Gleitflug ist
es aber, dass bei neutraler Höhenruderflosse ein
einwandfreier
und ausreichend langer Gleitflug
zustandekommt. Das ist wichtig, denn Nachtrimmen, wie
wir es von den
modernen Steuerungen her kennen,
das gibt es hier nicht!
|
|
|
|
|
|
|
|
 |
 |
 |
|
|
Empfangsanlage hat ausreichend Platz |
|
Blick ins Rumpfinnere |
 |
 |
 |
 |
|
Skizze der Flügelhalterung |
Teile der Flügelhalteerung |
die eingeklebte Flügelhalterung |
die Halterohre sind eingebaut |
 |
 |
 |
 |
|
Rumpdspitze aus Hartbalsateilen |
das zusammengebaute Leitwerk |
die großen Flügelsteckstifte |
angeschliffene Wurzelrippe |
|
|
|
|
|
|
Rudermnaschinen, Empfänger eingebaut |
|
|
|
 |
 |
 |
 |
|
erster provisorischer Zusammenbau |
|
|
|
|
|
|
|
|
|
bereit zuum Einfliegen |
|
|
|
|
|
|
|
|
|
|
|
|