| |
|
|
|
|
|
Ganz ganz selten kommt
es im Leben vor, dass man ein persönlich sehr be-
deutend bewertets Geschenk bekommt. Das passierte mir, denn
mein Freund
Ernst aus Krems, schenkte mir ein
lange abgestelltes Torpedoboot, welches er
von jemandem bekommen hatte, der es "Zobel" nannte. Es
handelt sich dabei
jedoch um das
Modell des Bootes "Dachs"
von Graupner. Das Boot ist bereits
mit Motoren ausgerüstet
gewesen, es
fehlte nur das Lenkservo. Natürlich fehl-
ten noch diverse andere
Kleinigkeiten.
Das Modell ist ein Modell aus Holz und
wurde bei
Graupner ab ~1966 als
Schnellboot Dachs angeboten.
Als Freund alter Modelle die eine
Überarbeitung brauchen, kam mir das Ge-
schenk sehr
gelegen. Ich habe für mich und die Enkelkinder ja noch
eine Mo-
toryacht, die alte Graupner Condor, gekauft,
die ebenfalls zu überarbeiten war.
Da kam das
Geschenk auch noch dazu und so werde ich mit schönen
Arbei-
ten längere Zeit beschäftigt sein und
danach drei schöne Schiffe haben. Aller-
dings habe ich an dem flotten Modellschiff Zobel ein größeres Interesse als an
der eleganten Condor, da es nahezu einsatzbereit ist und auch flotter gefahren
werden kann.
Schon bei der Abholung wurde mir klar, dass der
Erbauer das Boot "Zobel"
nicht
optimal nachgebaut hat. Ich möchte das nicht
kritisieren, es macht mir
auch nichts
aus, denn wer weiß wie das Schiff aussehen würde, hätte ich
es ge-
baut. Und die Verschönerungsarbeit
macht mir ja immer großen Spaß. Um bald
damit fahren zu können, wurden alle wichtigen Arbeiten
rasch erledigt.
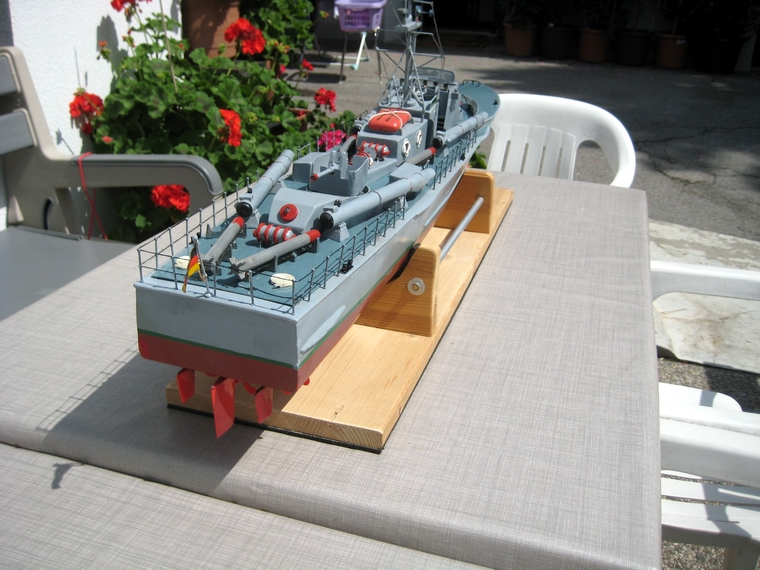
Technische
Daten Zobel (=Dachs,M 1: 45):
Länge: 95cm, Breite: 15,5cm, Gewicht:
3,1kg, Tiefgang: 50mm,
Tempo: ~4,8km/h.
Motore: 3 x Monoperm Super 6V/9W,
Regler:
2 x Robitronic RS 132 Speedstar 2,
Akku: 2 x Lipo 2S2700 parallel, Propeller: 3
je 40mm Dm., 2 gegenläufig,
Betriebsdrehzahl
vorw: ~3150U/Min, Rückw: ~1400U/Min,
Fernsteuerung: Flysky FS.i6 2,4Ghz-
Fahrt-Stop-Retour, Ruder, Motorab-
schaltung der
Außenmotore, Beleuchtung, Telemetriesensoren
für Motortem-
peratur und Akkuspannung
|

Torpedoboot Dachs / Zobel
(Graupner)

Fahrvideo Waldteich

Fahrvideo Werfthafen 2023
|
Die Aufarbeitung des
Schiffes beginnt
Gleich
nach dem Heimtransport wurde eine genaue Beschau des
Bootes durchgeführt. Da das
Modell lange Jahre
gestanden hat, muss die Funktion der Motore und Stevenrohre
zuerst einem Test
unterzogen werden. Die
Motoren laufen auch mit einem 4-Zelligen NiMh-Akku und
machen einen
guten Eindruck, scheinen aber
keine Kraftprotze zu sein. Früher hatte man diese Motore
als Standard
in den größeren Schiffsmodellen
verwendet. Der Fahrtest wird zeigen ob
mehr Leistung und damit
andere Motore notwendig wären.
Vordringlich
wurde der leichte Außenwandschaden oberhalb der Wasserlinie mit
Sekundenkleber
behoben. Auch von der Innenseite
wurde die Stelle mit Sekundenkleber versiegelt. Es war
nur eine
leichte Eindellung, die auf diese Weise
verstärkt und abgesichert woden ist. Der Balsaholz-Rumpf
weist zahlreiche
Eindruckstellen auf und ist auch im Bereich der
Wellenaustritte kaum beschliffen
worden. Daher wird
das Modell ein wenig überholt damit es für
die ersten Erprobungsfahrten bereit
ist. Eine
weitgehende Ausbesserung diverser Bauteile
kann
später erfolgen.
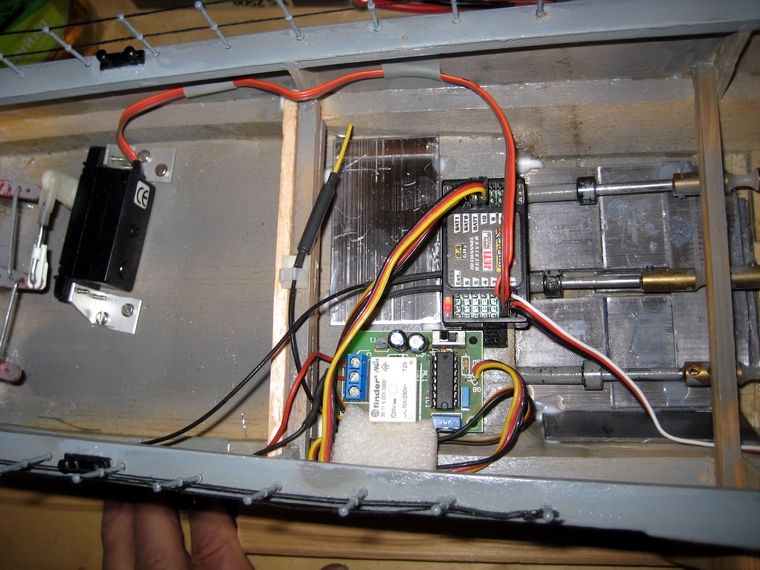
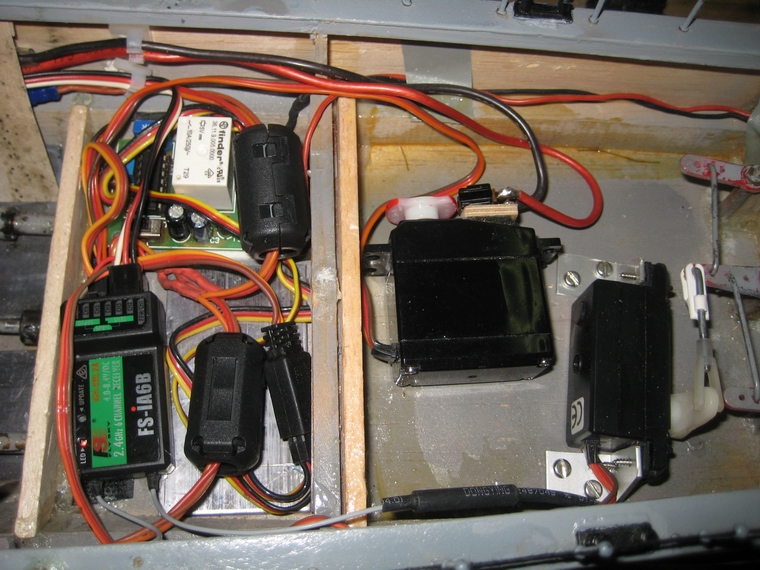
Provisorischer
Einbau eines Reglers und des Seitenruderservos
Um
eine Wasserung und Auswiegung des Bootes vornehmen zu
können, wurde ein (Auto-) Regler,
ein Jeti-Empfänger und ein Seitenruderservo eingebaut. Ein Flachservo wird
zur Steuerung verwendet,
welches liegend eingebaut wurde.
Zum Betrieb werden
zwei parallele Lipos 2S 2700 mAh verwendet,
welche vorläufig im Bugbereich
unmittelbar vor den
Motoren untergebracht wurden. Die Motore Monoperm Super haben 6V
Betriebs-
spannung (Höchstleistung von je 9W),
also muss beim Einsatz darauf geachtet werden, dass
nicht zu
lange mit Überspannung
( zB. über 8V) gefahren wird. - Alle drei Motore werden
vorerst gleichzeitig
ein- und ausgeschaltet, wobei die zwei
gegenläufigen Aussenmotore an einem Regler angeschlossen
sind und der mittlere Motor auch einen Regler hat. Die Fahrtsteuerung wird mit dem Gasknüppel
vorgenommen.
Bei der Inbetriebnahme und Einschaltung der
Empfangsanlage des Modells ist zu beachen, dass
der Gasknüppel in
Neutralstellung stehen muss, was Motor AUS bedeutet.
Knüppel nach vorne
ergibt die Vorwärtsfahrt, nach hninten
die Rückwärtsfahrt.
Weitere Arbeiten mit
Bleizugabe zur Trimmung des Bootes und an den Aufbauten
folgen
Im Zusammenhang mit der bevorstehenden
Auswiegung des Schiffes wurden zwei Wiegungen
durch-
geführt, bei denen einmal das Heckgewicht
von 995g und das Gewicht des Buges mit 1003g ermittelt
wurde. Das bedeutet, dass am Heck etwas mehr
Gewicht angeordnet werden muss. Die beiden 2S
Lipos
werden bugseitig vor den Motoren am Boden
liegend eingebaut, sodass vorne weniger
zusätz-
licher Ballast in Form von Bleiplatten
etc., eingebracht werden muss. Insgesamt wurden bisher
ca.300g
unter den Schiffschraubenwellen und
vor den Motoren ca.300g direkt am Rumpfboden angeklebt.
Die
ca. 450g der beiden liegenden Lipos werden
den Bug tiefer legen als den Heckbereich. Derzeit ist
das von Graupner angegebene Richtgewicht noch
nicht erreicht. Da die Absicht besteht, das Blei so
tief
als möglich im Rumpf unterzubringen kann im
Heckbereich
maximal eine Lage Bleiplatten ange-
klebt werden. Erst bei
der Auswiegung im Wasser wird sich zeigen, wo noch Blei
fehlt.
MIt dem
Blei und den Akkus ergibt sich, dass der Bugbereich
jetzt 1460g wiegt und das Heck 1400g.
Damit sollte
das Boot schon halbwegs entlang der Wasserlinie im
Wasser liegen. Die Feintrimmung
kann erst im Probebetrieb
erfolgen. Mit diesen Werten kommt die Zobel der
Gewichtsangabe von
Graupner schon nahe.
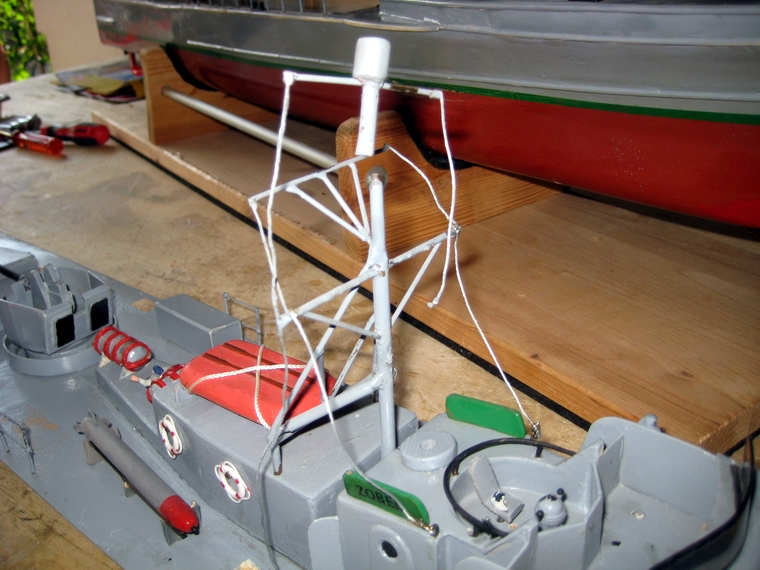
Um das
Boot startklar zu machen, mussten die Aufbauten renoviert
werden. Dabei wurde der vom Vor-
besitzer
eingebaute Getriebemotor für die Radarantenne aktiviert.
Um die Antenne rotieren lassen zu
können, wurde
ein zweizelliger NiMH Akku mit 900 mAh auf der
Deckunterseite angeklebt. Weiters
wurde eine Ladebuchse
und ein Schalter am Deck eingebaut. Darüber hinaus werden die
Positions-
lampen gegen solche mit
Leuchtdioden ausgetauscht und am Mast eine
Blink-Leuchtdiode angebracht,
die auch zur Spannungsüberwachung
dient. Die Leitungen zu den Dioden und ggf. anderen
Verbrau-
chern werden aus Lackdraht hergestellt und am Mast entlang angeklebt und danach
grau überstrichen.
Um die Deckaufbauten
mit Strom zu versorgen zu können, ohne einen Kabelsalat
im Rumpf zu haben,
wurden am Heck und dazu
passend auf dem Deck Kontaktflächen aus federndem Berylliumblech
an-
gebracht. Die an Deck befindlichen
Verbraucher können nur funktionieren, wenn die
Deckaufbauten
am Rumpf aufgelegt werden. Wenn das Deck
richtig aufliegt, kann es am Heck leicht niedergedrückt
werden, damit der Kontakt hergestellt wird. Zur Sicherheit
wurde ein Verriegelungshebel angebaut, der
das
selbständige Lösen des Decks verhindert. Sollen die
Deckbeleuchtungen eingeschaltet werden,
wird die kleine
Schaltelektronik mit einem Schalter am Sender aktiviert.
Der
Schwimmtest, die Auswiegung und die Behebung des
Wassereintrittes bei den Rudern
Endlich
konnte das Boot in der Badewanne einem Schwimm- und
Motortest unterzogen werden. Die
schon zuvor im Rumpf
gut verteilten Walzbleiplatten zeigten, dass das Boot
vorne ein wenig zu tief
liegt. Daher wurden hinter dem
Empfänger eineinhalb Bleiplatten aufgelegt. Damit
scheint das Boot
fürs Erste gut eingetrimmt. Auch der Antrieb wurde getestet und ist abzuwarten,
wie flott das Boot fah-
ren wird. Bei den Stevenrohren war
kein Wassereintritt feststellbar. Der Tiefgang
dürfte noch nicht ganz
dem von Graupner angegebenen Wert
entsprechen und kann erst bei der Probefahrt
optimiert werden.
Während der Lauftests
trat an den drei Ruderführungsrohren etwas Wasser ins
Heckteil ein. Zur Behe-
bung des Mangels
wurden die Ruder ausgebaut und die Ruderwellen vor dem
Wiedereinbau eingefet-
tet. Als zusätzliche
Abdichtung wurden auf die aus dem Rumpf vorstehenden
Rohrenden kurze Silikon-
schläuche aufgesteckt die
ca. 1mm die Stutzen überragen und auf den Ruderwellen
abdichten. Die
Ruderwellen wurden so
weit eingeschoben und festgeschraubt, dass die
Schläuche am Ruder oben
aufliegen und durch das Verengen des Silikonmaterials, an der Ruderwelle anliegen
und abdichten.
Diese Methode
funktioniert.
Einbau eines
zweiten Reglers
Infolge eines
Reglerausfalls bei der alten Motoryacht Condor mitten
auf einem Teich, fiel der Ent-
schluss, in die
Zobel einen zweiten Regler einzubauen. Mit Glück erhielt
ich zwei Stunden nach dem
Empfängerausfall bei
der Condor, das nur mit einem Motor ausgerüstete Schiff
wieder zurück. Die
Ursache war ein überhitzter Regler,
der wegen Überspannung abgeschaltet hatte. Allerdings ließ er
sich via
Fernsteuerung nicht
wieder einschalten. Erst nachdem der Regler
händisch abgeschaltet
und
dann wieder eingeschaltet worden ist lief der Motor
wieder. Mit einem zusätzlichen Kühlkörper an
der
Unterseite des Reglers, kommt es im Test am Bautisch zu keinen Anzeichen von Überhitzung.
Der
Regler wurde aber durch einen für 3S Lipos
geeigneten ausgetauscht.
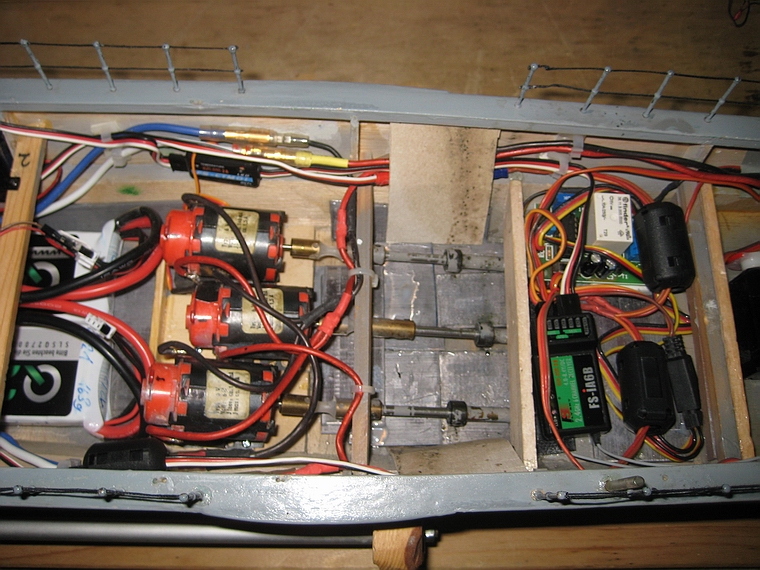
Um
ein solches Debakel mit der Zobel zu verhindern,
entschied ich mich, wie oft in den Foren ange-
regt, einen zweiten
Regler einzubauen, der nur den mittleren Motor mit
Fahrstrom versorgt. Der Motor
kann am Sender vom
Gasknüppel weggeschaltet und mit dem daneben
befindlichen Schieberegler
der anfänglich benützten
MC 24 gefahren werden. Die Wegschaltung der Außenmotore
ist nicht un-
bedingt notwendig und kann später
vorgenommen werden.
Fahrbericht
Das Boot war
schon sehr gut ausgewogen ins Wasser gelassen worden.
Nach der ersten Fahrt
wurden im Rumpfbug doch noch 150g
Blei in Platten eingebracht, damit das Boot vorne etwas
tiefer
liegt und das Heck ein wenig höher
kommt. Die Fahrgeschwindigkeit ist nach meinem Empfínden
in
Ordnung, reicht aber bei weitem nicht an die
Fahrgeschwindigkeit der im Internet gezeigter Boote
heran. Ich denke in den Jahren um 1957 war das
auch nicht so vorgesehen. Mit den beiden parallel
geschalteten Akkus (5400mAh) kann man bei
mittelmäßigem Tempo deutlich länger als 15 Minuten
fahren. Das
nicht allzu schnelle Schiff eignet sich für meine
Enkel als erstes schnelleres Boot beim
Erlernen des
Steuerns von Modellschiffen.
Obwohl ich es nicht
mit Höchgstgeschwindigkeit fahren ließ, war
es genussvoll mit dem Schiff zu
fahren.Unangenehm
fielen mir bei der Testfahrt die Laufgeräusche auf, die
vermutlich von zu groß
eingestelltem Axailspiel
der Schiffschraubenwellen stammen.
Änderung der Fernsteuerung
Beim
Transport des Bootes bis zur Startstelle ohne einen Helfer, ist
die ursprünglich vewendete
schwere MC 24 ein Handicap. Beim Patrolboat des
Konstantin wurde ja eine Exmitter EX 6
Proporti-
onalsteuerung eingebaut, die einen kleinen
leichten Handsender, den Exmitter EX 6 hat. Da es eine
besser
ausgestattete EX 7 gibt, wurde sie beschafft
und im Zobel verwendet. Die
Umstellung verlief
problemlos und die Regler
reagieren einwandfrei auf die Steuerbefehle. Die
Steuerung des Motors
erfolgt jetzt jedoch über Kanal
3! Die Beleuchtung und Radarantenne kann mit einem
Schalter ein-./
ausgeschaltet werden.
Nachbesserung bei der Motormontage
Bei genauer Beschau des Schiffes im Frühjahr
2021 fiel auf, dass ein Propeller kleiner ist. Die
beiden
anderen Props haben Durchmesser 40mm und
einer links hatte 35mm, sodass er auch auf einen mit
40mm Durchmesser ausgetauscht wurde. Dabei
zeigte sich, wie alt das Schiff schon ist, denn es diese
roten
Graupner Propeller sind nicht mehr zu kaufen, sondern
nurmehr schwarze.
Im Zuge der
Probeläufe am Bautisch gab es bei der rechten Welle (aus
Sicht vom Motor weg) erheb-
liche Vibrationen,
die nicht von einer verbogenen Motorwelle verursacht
werden.
Alle Veränderungen an
der Lage der Wellenkupplung
änderte das Problem nicht, doch entstand der
Verdacht, dass es an der
Wellenkupplung liegt, die nicht
rund und etwas abgewinkelt läuft. Zur
Verbesserung der Situation wurde
die Einbaulage des Motors angehoben, damit die Kupplung besser mit der Schiffschraubenwelle
fluchtet.
Dazu wurde der Motor um 3mm angehoben und neu angeschraubt.
Dadurch wurde eine wesentliche
Verbesserung erreicht. Die Geräuschentwicklung des Antriebes konnte durch
die Reduzierung des
Axialspieles der Schiffschraubenwellen
merklich verringert werden. Vermutlich muss das Spiel
auf
nahezu NULL eingestellt werden.
Neuerliche Änderung
der Fernsteuerung
Nachdem das Boot
nach einem Jahr am Dachboden wieder herabgeholt wurde,
stellte ich fest, dass
nicht alles so
funktioniert, wie ich dachte, dass es funktioniert hat.
Da wäre die Möglichkeit der Abschal-
tung der äußeren
Motore, die nicht raliesiert worden sein dürfte. Jetzt
sind die Außenmotore via Schalt-
servo abschaltbar,
sodass der mittlere Motor dauernd läuft. Daher wurde an
ihm ein Temperatursensor
befestigt. Bei der Erstfahrt
sind kaum längere Strecken
mit Vollgas gefahren worden und daher ist un-
bekannt, ob
die Motore überbelastet waren.
Für die
Möglichkeit der Motorabschaltung wurde ein altes Servo
mit einem Mikroschalter eingebaut.
Der Schalter
liegt in der Stromverbindung vom Regler zum Motor.
Ein neues Problem entstand bei den Tischtests
mit Vollgas und weniger Drehzahl, indem der mittlere
Motor nach einiger Laufzeit abschaltete oder
sogar auf retour umschaltete. Der zuständige Regler
wurde
neu eingelernt und zur Sicherheit
Ferritkerne an den Reglerleitungen zum Empfänger
angebracht. Nun
läuft der Motor (bisher)
ordentlich. Ein kleiens Problem gab es auch noch bei der
Beleuchtung die eben-
falls zu flakkern begann,
wenn die Motore liefen. Auch dort wurde ein Ferritkern
angebracht der die Situ-
ation deutlich verbesserte;
obwohl abgeschaltet blinkt die Beleuchtung gelegentlich
ganz kurz auf, was
man bei der Fahrt kaum
bemerken kann.
Bei der nächsten Fahrt muss
auf die Gewichtsverteilung infole Servoeinbau geachtet
werden.
|
|
|
|
|
|
 |
 |
 |
 |
|
|
|
|
|
 |
 |
 |
|
|
|
|
|
|
 |
 |
 |
 |
|
|
|
|
|
 |
 |
 |
 |
|
|
Zobel in Transportbox |
die damals bei GR verwendeten Motore |
Rumpf-Frästeil - aus dem Prospekt |
 |
 |
 |
|
|
erste Fahrt am Waldteich |
|
|
|
 |
 |
|
 |
|
|
|
|
der
Slipwagen
für das Schiff |
 |
|
 |
|
|
Bilder aus der Werft 17.9.23 |
Fahrvideo Werfthafen 2023 |
|
|
|
Die Aufarbeitung |
|
|
|
|
|
 |
 |
 |
 |
so bekam ich das Schiff
|
|
|
|
 |
 |
 |
 |
|
die Monoperm 6V Motore |
|
|
|
 |
 |
 |
 |
|
|
|
|
|
 |
 |
 |
 |
|
schon etwas überarbeitet |
|
|
|
 |
 |
 |
 |
|
|
|
|
|
 |
 |
 |
 |
|
|
|
|
|
 |
 |
 |
 |
|
|
|
|
Prop 35mm und Ruder mit Dichtungen |
 |
 |
 |
 |
|
|
|
|
|
 |
 |
 |
 |
|
|
einsatzbereite Technik |
Antennenausgang |
Schiff mit der alten Varioprop12 |
 |
 |
|
|
|
neuer Empfänger und Sensoren |
neu Schaltservo Motorenabschaltung |
|
|
|
|
|