| |
|
|
|
|
|
Die Vorgeschichte:
Neulich
hat sich mein Freund Franz
ein Modell "Seabex
one" gekauft,
welches einer Überarbeitung
bedurfte. Er bräuchte für das Schiff schnell
einen Modellständer,
um die vier Schottel Antriebe zu schützen, die aus
dem
Rumpf herausragen. Der Ständer wäre wichtig, da sonst
das
Modell
nicht ordentlich abgestellt und
transportiert werden könnte. Mit zwei Fotos
vom
Modell konnte ich erkennen, dass es sich um ein großes
und aufwän-
dig ausgestattetes Modell handelt.
Und zuletzt ersuchte er, dass ich das
Modell
für ihn betriebsbereit machen möge. - Mein Interesse war
geweckt,
sodass ich zusagte, wohl wissend, dass
ich dafür viel über die für mich
neue, ehemals bei Schiffen
verwendete Technik werde lernen müssen.
Er brachte das schöne und große Modell
vorbei und wir warfen einen Blick
in den Rumpf.
Unglaublich, wieviele Elektronikeinbauten vorhanden
sind.
Ohne Scheu sage ich, dass ich zwar
erkenne, dass Decodermodule und
serienweise
Relais eingebaut sind, dass mir diese Technik unbekannt
ist.
Die vier Schottelantriebe und der
ansteuerbare Kran samt seinen Winden,
die
Wasserpumpen der Löschkanonen, die Beleuchtung, der
Hubschrauber
und die Alarmsirene stellen schon
eine sehr hohe Stufe des Schiffsmodell-
baus dar.
Der Erbauer hat sich so weit fetstellbar genau an die
Bauan-
leitung gehalten. Offenbar hat er aber wenig an die künftig vielleicht notwen-
digen
Zugriffe vergessen, denn ich kann nur hoffen, dass zu
einigen Bau-
guppen kein
tiefer Eingriff bei der Wiederinbetriebnahme
notwendig wird.
Es wird sich zeigen, wie die
vielen Sonderfunktionen betrieben werden
können,
denn dazu bräuchte man den dafür ausgerüsteten Sender.
Doch
den Sender des Modells gab es nichtmehr
zu kaufen.
Bei der Aufarbeitung des Modells bis zur
Betriebsaufnahme war notwendig
herauszufinden,
welcher Sender dazu gebraucht wird. Ein Freund aus dem
Schiffe Forum half weiter und ich erhielt ein
Bild, wie er aussehen könnte.
Wenn ein Sender
da ist wird herauszufindensein, welcher der vielen Codier-
schalter, welche Funktion
steuert. Und ohne einen dazupassenden Sender
wird das ein problematisches und nahezu unmögliches
Unterfangen werden.
Die erste naive Suche brachte
einen Futaba F14 Sender mit Kodiermodulen
und
40mHz auf den Bautisch, der jedoch nicht zum verbauten
Robbe FMSS
35mHz Empfänger, schlimmer nioch, zu
den Robbe Decodern im Modell da-
zupasste.
Die
Suche nach einem Robbe Sender mit den passenden Schalter
Modulen
begann und es war unvorhersehbar, wie
es weitergehen wird.
Technische
Daten Tauchbasisschiff Seabex one, M 1:75 (Graupner,
1981):
Länge: 1450mm, Breite: 260mm, Fahrgewicht: derzeit
13700g,
Motore Antrieb: 4 x12V, (4 x Schottelantriebe,
4 Blattprops, 40 Dm),
Akku Antrieb: 2 x 6V 12Ah Bleiakku parallel
geschaltet,
Akku Wasserpumpen und Sonderfunktionen: 6V
4,5Ah Bleiakku,
Akku für Beleuchtung: 4V 4,5Ah,
Bleiakku,
Fernsteuerung: Robbe Promars Top Modul, 2x
Multi-Switch-Modul, Dual-Rate-
Modul und 2x
Schalt-Proportional-Modul (im Modell nicht aktiv),
Funktionen: Vor-Zück, Geschwindigkeit, Ruder, Kran,
Beleuchtung, Strahlrohre,
Hubschrauber Rotor,
Alarmsirene
|

Seabex
One (Graupner)

Video vom Modell


Fahrvideo Werfthafen

Robbe 40mHz-Sender der Seabex
Arbeitsliste
Betriebsanleitung |
|
Wiederinbetriebnahme einer Seabex one
Schon
die Bitte des Freundes
zum Bau einen Modellständers konnte
ich nicht abschlagen, da mein
Projekt France
momentan nicht weitergearbeitet werden konnte, da es für die
Vorarbeiten für die
Lackierung im Freien viel zu kalt und zu feucht war.
Bei
der Übergabe der Seabex wurde ein Blick ins belebte Innenleben
des Modells riskiert. Das
per-
fekt und im Vergleich mit der
Bauanleitung offensichtlich genau nach Plan gebaute
Modell ist tech-
nisch voll ausgestattet. Zwei
Codermodule mit vielen nachgeschalteten Relais, zwei 30A
Regler für
die Antriebe usw. - Für mich
alles eine unbekannte Technik.
Rasch wurde durch Fremdanspeisung an den
dutzenden Klemmenanschlüssen klar, dass der Kran
voll funktionierend
ansteuerbar ist. Der Hubschrauber verfügt
über einen Antrieb des Rotors, der
ebenso schaltbar ist. Am schwierig abzuhebenden Aufbau ist ein
Lautsprecher für das Geräusch-
modul Sirene vorhanden. Ebenso ist die Beleuchtung am und im Modell schaltbar
und mit Lämpchen
aus der Bauzeit in den frühen
80ziger Jahren (noch keine
LEDs) ausgestattet. Im Rumpfheck befin-
den sich zwei
Wasserpumpen die Wasser zu den vier Strahlrohren hochpumpen. Eine Ansaugöff-
nung für das
Wasser wurde noch nicht gefunden.
Zwei Schottelantriebe am Bug und am
Heck dienen zum Antrieb und zur Lenkung des Schiffs. Das
Fahren des Modells wird später vielleicht zu
einer interessanten Erfahrung werden.
Die zwei Decodermodule
im Modell sind mit
reichlich nachgeschalteten Relais verbunden, die erken-
nen
ließen,
dass das Modell ein Könner gebaut hat, der dazu die
handwerklichen und technischen
Fähigkieten zur
Fertigstellung hatte und weder an Kosten noch an Arbeit
gespart hat.
Nach ersten Informationen zur
alten Robbe-Decodertechnik war zu erkennen, dass die
Beschaffung
eines passenden Senders mit den
Encoder-Schaltmodulen ein Problem werden wird. Ein lieber
Freund und Experte aus dem Forum
>rc-m,odellbau-schiffe.de< sagte Bemühung zu, einen
Sender
zu finden.
Die Inbetriebnahme des
aufwändigen Modells reizte mich, doch muss zuerst
meine SS France fertg
gebaut werden. Bis
dahin muss es meinem Freund gelingen, einen Robbe Sender mit zwei
Schalt-
modulen aufzutreiben, oder zwei
Schaltmodule, die zu einem anderen Sender passend, eingebaut
werden können.
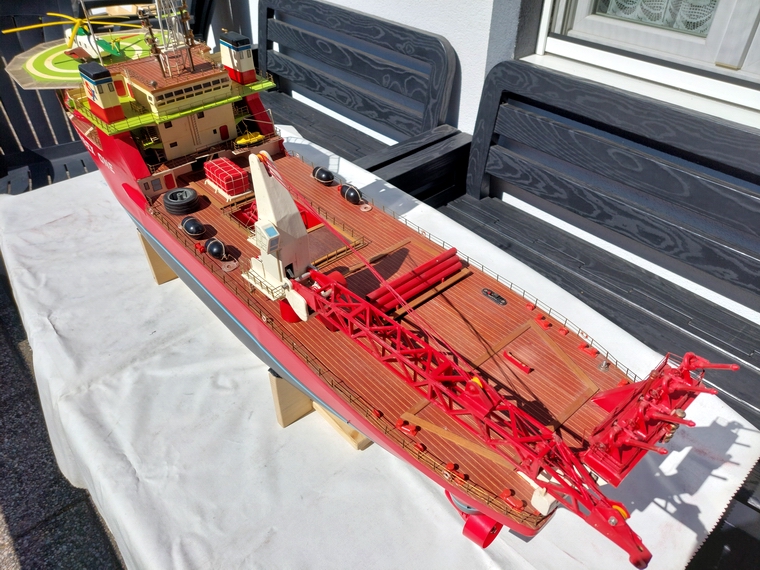
Für Eilige die ersten Bilder
vom fahrbereiten Modell.
|
Seabex fertig
|
|
|
|
|
|
|
|
 |
 |
 |
|
Nun ist sie fahrbereit fertig |
|
|
|
 |
 |
 |
 |
|
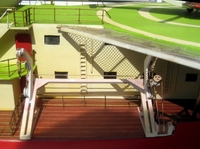
Hubschrauberdeck |
Davits sehr genau nachgebikdet |
das Rettungsschiff hängt |
|
 |
 |
 |
 |
|
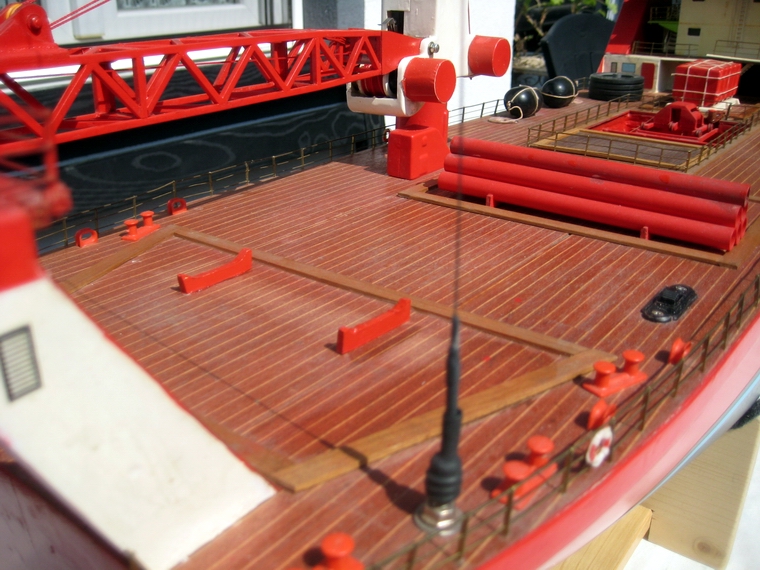
Blick auf die Ankerwinde |
Akkuraum-Deckel mit Stapel |
die Antenne ist angeschraubt |
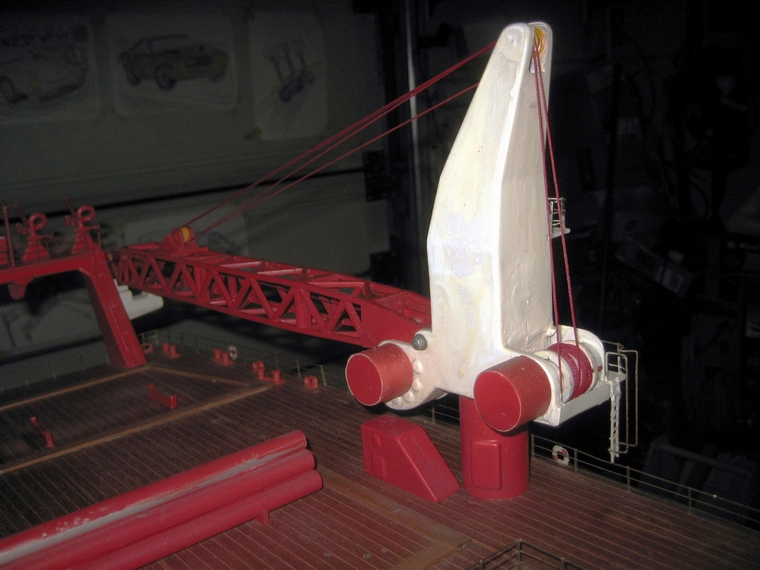
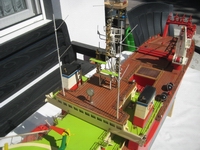
Ansicht Kran und Löschbatterie |
 |
 |
 |
 |
|
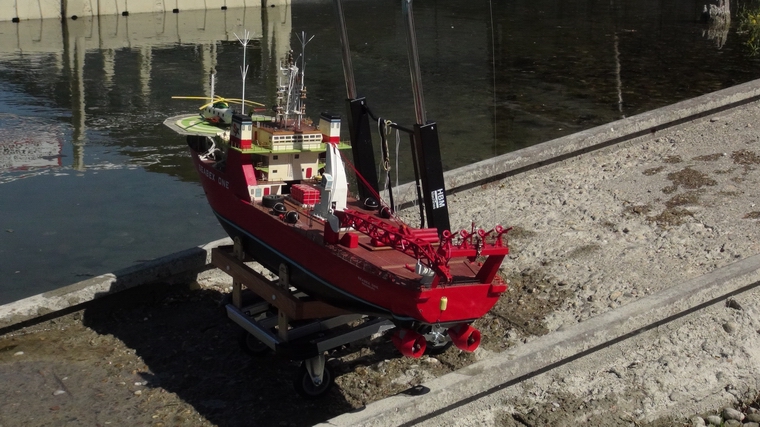
Seabeex am Slipwagen |
|
|
|
|
So kam die Seabex an |
|
|
 |
 |
 |
 |
|
Seabex am Modellständer |
|
|
|
 |
 |
 |
 |
|
|
|
|
|
 |
 |
 |
 |
|
|
|
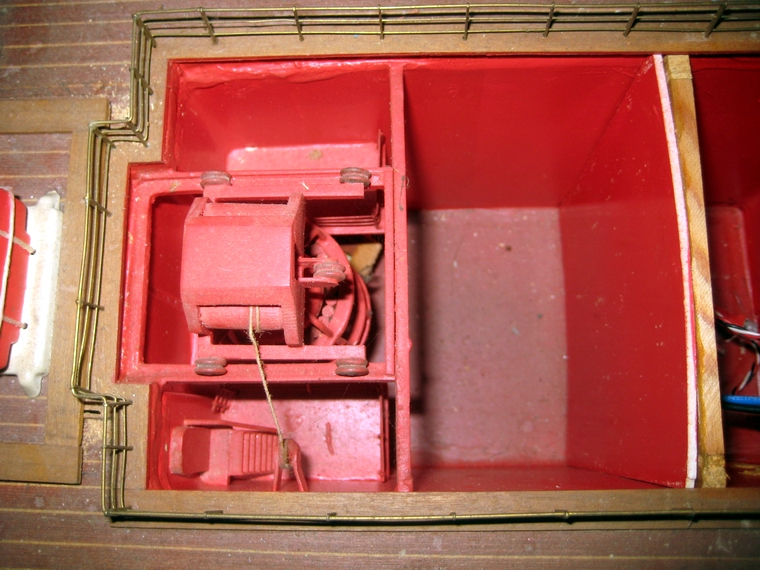
Blick in den Akkubereich |
der
Slipwagen
zur Wasserung des Modells |
 |
 |
 |
 |
|
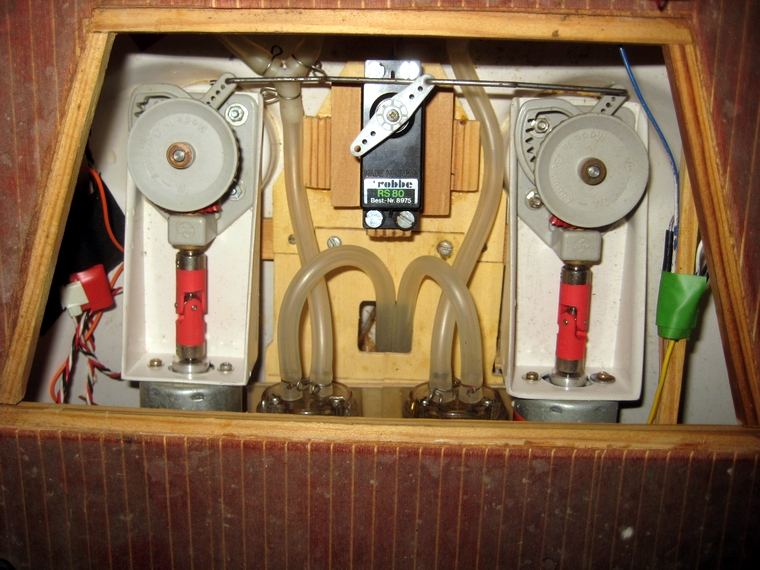
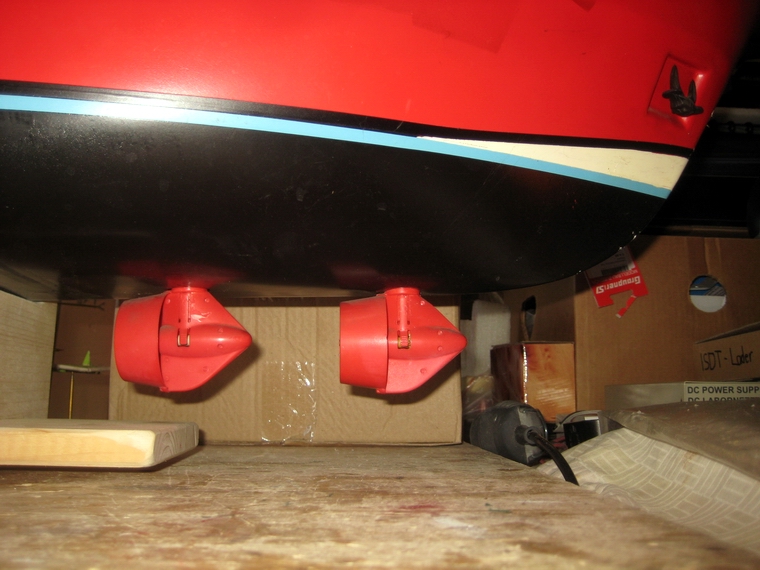
Heckantriebe |
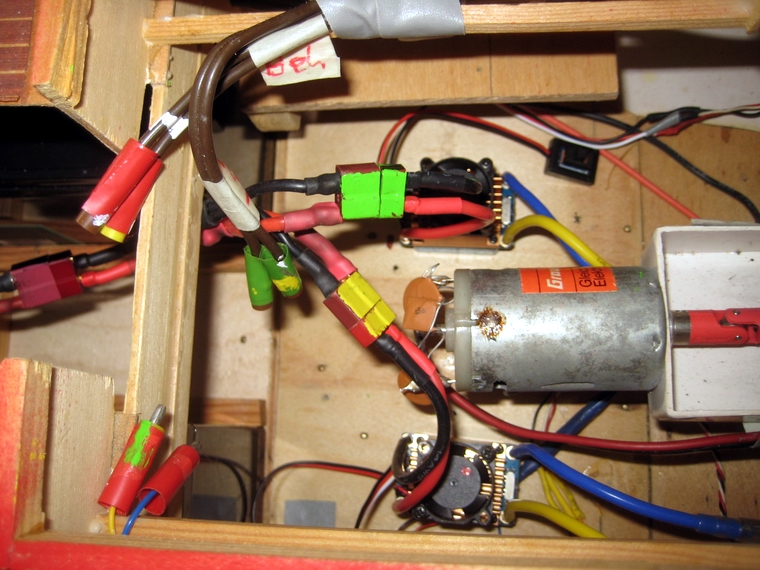
Blick auf Bugmotor und Elektronik |
Ansicht der Decoer mit Relais und Empfänger |
|
 |
|
 |
 |
|
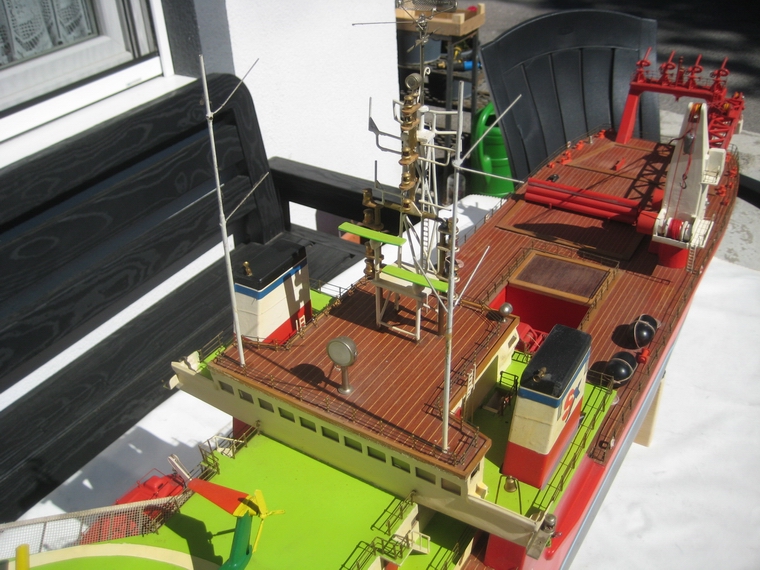
Bilder vom Modell nach der Waschung |
Heckansicht sieht sauber aus |
Blick auf Hubschrauberlandeplatz |
Brückengebäude mit Mast und Antennen |
 |
 |
 |
 |
|
Hinteransicht auf Brückengebäude |
Blick auf die Taucherglocke |
Löschmonitore |
voll funktionstauglicher Kran |
 |
 |
 |
 |
|
Schottelantriebe montiert |
|
|
|
|
Der Beginn der Arbeit
an der Seabex |
|
Nachdem
die SS France fertig war, konnte mir mein Freund
sein Schiff bringen. Dazu gab es auch
einen
allenfalls geeigneten Futaba F14 Sender mit zwei
Schaltermodulen, allerdings in der weit
moderneren Version,
die leider nicht zu den alten Codier Modulen in Schiff passt.
Das hätte bedeutet,
dass wir andere Module im Modell brauchen
würden.
Die Ursache die zur F14 führte war, dass die
Beschaffung der ursprünglichen Switch Module Module 8963
kurzfristig unmöglich war, wie auch die
Beschaffung von Robbe Sendern mit den passenden
Schaltermodulen. Die Spekulation, die Module
der F14 könnten passen, war leider falsch.
Bei der Suche nach
einem geeigneten Sender fand mein Freund doch einen
(kostspieligen) Robbe
Promars
Sender mit einem Schalter Modul. Als das Modell
am Tisch stand wurde immer klarer, dass
wir diesen Promars Sender brauchen und noch ein
weiteres Schaltmodul beschaffen müssen ,um alle
Sonderfunktionen
benützen zu
können.
Duch Kontakt zu Freund Gerrit aus dem
Schiffe Forum ergab sich, dass er aus seinem
"Museums-
Sender" ein Modul für uns ausbaut und die Öffnung durch den bei
unserem Sender frei werdenden
Deckel
verschließen kann. Er hat dann Zeit, ein anderes Modul
zu beschaffen. Das ermöglicht uns,
deutlich
rascher die Seabex mit all ihren Funktionen
betreiben zu können. Es wird noch einigeTage
dauern, bis
der Sender da sein wird.
Inzwischen begann ich mir die Verkabelung
anzusehen. Der im Schiff befindliche 35mHz Empfänger
mit
K 62 FMSS reizte mich, einen Steuerversuch mit meiner MC 24 zu
unternehmen, zu der ich den
K 62 Sender Quarz hatte
und damit die Steuerung möglich war..
Zuvor
wurden die Schottel Antriebe montiert. Eine etwas
wackelige Sache, aber sie funktionieren
alle. Offen
war jetzt die Frage, welche Akkus für die Stromversorgung
erforderlich sind. In der Bau-
anleitung sind sie
angeführt, mich irritierte es aber, dass für die
Antriebsmotore mit 12V Nennspan-
nung nur 6V Akkus
verwendet werden. Die Anfrage an Freund Gerrit ergab,
dass für die Antriebs-
gruppen jeweiles 6V Akkus
verwendet werden und nur für die Wasserpumpen 12V. Er schlug
vor
anstelle der Bleiakkus LiFePo-Akkus zu
vferwenden, da die mit 6,6V etwas mehr Drehzahl bringen
und weniger starke Spannungseinbrüche bei
Belastung haben als Blei Akkus. - Allerdings sind
diese
Akkus meiner Meinung nach für den bestimmt eher sehr seltenen Betrieb des Modell
viel zu
teuer und erfordern eine neue Ladetechnik, die
mein Freund zurzeit nicht haben möchte.
Tatsächlich
gelang alsbald die Steuerung der vorderen und hinteren
Schottelantriebe. Betreffend
die Antriebe
wurden die 12V Motore mit einem 3S Lipo erfolgreich
getestet. Die Wasserpumpen,
deren Ansaugöfnung
noch nicht gefunden werden konnte, wurden erst später erprobt. Da bei mir
kleinere 6V Bleiakkus
vorhanden waren, wurden sie einstweilen an den Kabeln für die
Antriebsver-
sorgung angeschlossen. Und
nach verzweifelten Bewegungen an den Knüppeln der MC 24
began-
nen die Antriebe teilweise zu laufen. Offen bar
hängt das Ansprechen der Motore mit den alten
Robbe30A
Reglern zusammen, an denen man die Drehrichtung
und die obere und untere Drehzahl
der Motore und den Neutralpunkt einstellen kann,
vorausgesetzt, man kommt zu den EInstellreglern
hin.
Bevor an den angeklebten Reglern Hand angelegt wird,
wurde auf den künftig verwendeten
Sender
gewartet.
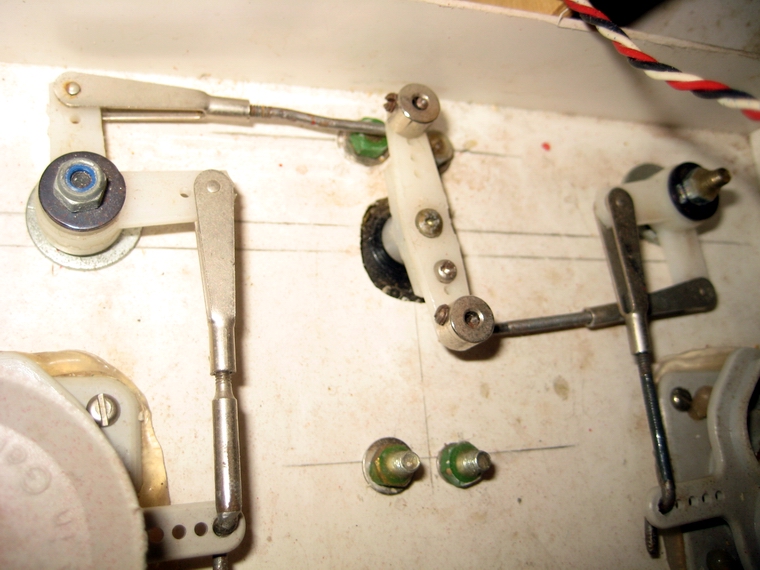
Ungeachtet dessen fiel
auf, dass das Lenkservo für die Bug Antriebe zittert und
es wurde klar, dass
es ausgetauscht werden muss. -
Doch die Montage des Servos verursachte
Kopfzerbrechen.
Im Vorfeld holte ich
im Forum Informationen ein, wie man die Schottelantriebe
für die Fahrt verwen-
det und mit
dem Sender steuert. Es bietet sich an, beide
Kreuzknüppel zu verwendnen. Klar.
Grundsätzlich wird der
Heckantrieb für die normalen Fahrmanöver verwendet,
wobei der Gasknü-
pel in jeder gewünschten Stellung
stehen kann. Der vordere Antrieb wird zB für
höhere Fahrge-
schwindigkeit zugeschaltet, wobei der
Knüppel auf die gewünchte Dauer zu halten ist.
Bei einem
Lenkeinsatz der voderen Antriebe muss
auch der Steuerwinkel und die Drehzahleinstellung
gehalten
werden, weil ansonsten der Knüppel
durch Federkraft in die Neutrallage zurück gehen würde.
Schließlich
begann die erste Arbeit am Modell mit einer Waschung der
Aufbauten, des Decks und
des Rumpfes mit
Seifenwasser und Pressluft. Jetzt macht das Angreifen
des Modells Spaß. Da-
nach begannen die
wirklichen Arbeiten am Modell.
Servoaustausch
des Bug- und Heck Lenkservos
Da während aller
Tests das Zittern des Servos in jeder Stellung vorlag
war klar, es musste ausge-
tauscht werden. Das
ist an der Stelle schwierig, denn das Servo ist von
unten her befestigt, unklar
wie.
Bereits das
Aushängen der Anlenkungen ließ erkennen, dass die
Operation herausfordernd wird.
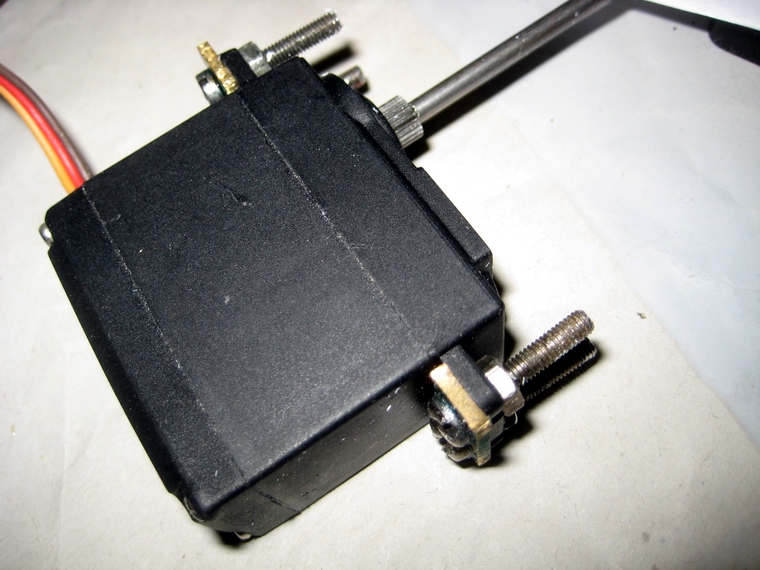
Tatsächlich war
das Servo durch in den Servo-Gummibuchsen nach oben
ragenden M3 Schrauben
befestigt. Die Schrauben reichten
durch die Kunststoffhalterung der Antriebe durch und
waren mit
M3 Muttern befestigt. Ein Öffnen
dieser Muttern war nicht möglich, da sich die
Schrauben durch-
drehten. Sie mussten mit der
Mini-Schruppscheibe abgeschlnitten werden, was durch die
Hitze zu
kleinen Beschädigungen der Bohrungen im Kunststoff
der Antriebseinheit führte.
Das neue 9kg-Servo gleicher Baugröße
erhielt neue Befestigungsschrauben. Eine kleine Mes-
singplatte
erhielt Gewinde im Lochabstand der Servoshalterung. Dort wurden
M3 Schrauben ein-
gedreht, mit Loctide
geklebt und an der Oberseite der Servohalter mit Kontermuttern
gesichert.
Nun konnte das Servo von unten in die Kunststoffplatte
eingeschoben und mit Beillagescheiben
und M3
Muttern befestigt werden. Es zeigte sich, dass die
Überlängen der Schrauben die Anlenk-
gestänge
behindern, weil das neue Servo eine etwas andere Bauart hat. Die Änderung ergab eine
Erneuerung der
Anlenkungen zu den Umlenkhebeln. Bei der
Einstellung der Lenkung trat am Servo
ein Defekt auf,
das Servo bekam einen Getriebeschaden (Billigservo mit
Metallgetriebe). Ein
weiteres neues Servo steckte von Beginn an,
doch das dritte Servo funktioniert
gut.
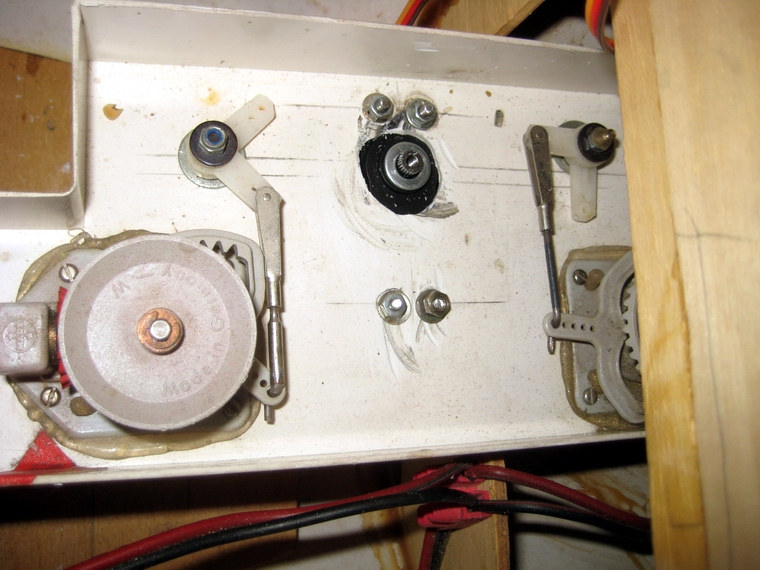
Um die Anlenkungen berührungsfrei zu den
Servo Schrauben zu bekommen, musste der Aus-
schnitt
für das Servo vergrößert und das Servo neu montiert
werden.
Gegenüber den alten Heckantrieben
funktioniert die Neutralstellung der Bugantriebe infolge der
vielen Umlenkhebel
nur mit viel Spiel. Zusätzlich bedingen die
Kunststoffantriebsteile der Schottel-
antriebe
ein negatives Wendemoment, welches die Antriebe ein
wenig auslenken lässt.
Wieweit das beim Fahrbetrieb
stört wird man sehen. Notfalls muss das mit der Sendertrimmung
ausgeglichen
und später ggf. mechanisch angepasst werden.
Bedingt durch die
"Einfachheit" alter Sender muss die Mitteneinstellung
bei den Funktionen
me-
chanisch erfolgen. Die im Schiff
verbauten alten Robbe RS
10 Servos der Seabex hatten einen
Vierkant.Mitnehmer auf dem die
Ruderhebel saßen, sodass am Servo keine
Feineinstellung zur
Korrektur möglich war. Moderne
Servos haben heute eine Verzahnung die einen
Ausgleich durch
Versetzten des Ruderhebels ermöglichen.
Aber bei den erneuerten Servosd musste eine weitere
Feineinstellung
über das Rudergestänge vorgenommen werden.
Regelrprobleme mit den alten Robbe 30A HEC
Kompaktreglern und deren Ersatz
Die eingebauten zwei
Regler haben nachgeschaltete Relaisgruppen. Heute ist
das unvorstellbar.
Die Regler haben je 4 Potis an
denen die Drehrichtung, die Nullstellung und zwei
Geschwindigkeits-
einstellungen (vermutlich für
die Fahrtrichtung) justiert werden können. Bei einem Regler gelang die
Einstellung mit veränderlicher Drehzahlwahl. Der
zweite Regler lässt derzeit nur Volle Drehzahlrege-
lung
in einer Richtungen zu. Das ist unbefriedigend
und es wird die Verwendung moderner Regler
notwendig.
Da ungewiss war, wann der Sender des Freundes
eintreffen wird, kaufte ich ein Set und musste
vorerst mit meiner erworbenen, gebrauchten Promars die
Funktion der Antriebe erproben.
Und
tatsächlich ist auch mit meiner Promars das Regler
Problem nicht lösbar. Die
Mittenkorrektur bei
den Bug- und Heck-Antrieben gelang
mit einem neuen Servo durch die Verstellung des
Vielzahn-
Ruderhebels.
Nach einigen Tests mit den Ruderausschlägen wurde mir
bereits klar, dass das
Fahren des Schiff
noch spannend werden wird.
Man kann beim Fahrbetrieb gegebenenfalls Änderungen an
den Trim-
mungseinstellungen für die
Geradeausfahrt vornehmen. Hätte man einen Sender der
wie heute üb-
lich programmierbar
ist, kann das einfach erfolgen. Bei der alten
Promars Technik geht das Umkeh-
ren der Kanäle
schon, sonst aber nichts mehr. So war es eben in
der Zeit um 1980.
Das Ergebnis
stundenlanger Plagerei mit einem Regler endete mit der
Erkenntnis, dass er schad-
haft ist. Um das
Problem zu beheben wurde für jede Antriebsgruppe ein
New Rain 60A Regler ein-
gebaut. Doch auch
hier bestand das Problem, dass ich alt und ... bin, mit den
Kabeln herumhan-
tierte und dabei gleich einen
Regler durch Falschpolung beleidigt habe. Zum Glück habe
ich genü-
gend auf Lager und dann klappte es. Um
die bedingt ungünstig verstauten großen Akkus gut ver-
drahten zu
können, wurden Kabel angefertigt und ein
zweipoliger Schiebeschalter, der Hauptschalter
am Deckel des Akkuraumes
eingebaut. Mit dem Schalter werden beide Stromversorgungen der
Regler
und Motrgruppen geschaltet. - Über die Regler BECs werden der Empfännger, die Schalt-
module und die Servos versorgt.
Wie die Stromversorgung des Krans und
Hubschraubers und---? (6V) bzw der Wasserpumpen
erfolgen kann, musste noch erprobt werden. Es war abzuwarten, bis
der Sender mit dem Schalter-
Modul kommt, denn dann
kann
man erst sehen, was angesteuert wird. Nach dem Einbau des
zweiten Schalter Moduls werden alle Funktionen aktivierbar
sein.
Zwischenzeitlich wurde wie geplant auch
das Heck-Ruderservo getauscht, denn bei alten Steue-
rungen
im Sender ist eine Mittenkorrektur nicht möglich
Der Tausch gegen ein Servo mit ver-
zahnter
Rudernocke war daher auch hier angebracht. Die
Verwendung war nicht so einfach wie
gedacht möglich, da die
vom Erbauer hergestellte Befestigung des Steuergestänges nicht sehr
reparaturfreundlich war. Bei dem Hantieren an dem
Steuergestänge verstellte sich ein Schottel-
Antrieb
und musste wieder mühsam normalisiert und eingestellt werden.
Danach
wurde an der Verkabelung weitergearbeitet und Ladekabel angefertigt, damit die Akkus
zum Aufladen nicht aus dem Schiff genommen werden
müssen, da die Pole sonst nicht erreicht
werden
können. - Weiters war der
Endschalter am Hubseil zu erneuern. Mit Glück
gelang die rich-
tige Beschaltung eines ähnlichen
Mikroschalters.
Anschließend
wurde durch externe Stromzuführung mit einer Lipo Zelle
(anstelle 6V) versucht, die
Kranfunktionen zu
testen.
Über die diversen Relaisklemmenanschlüsse gelang es die
Hubwinde
für den
Kranhaken zu bewegen und das noch verdrillte Seil (~2m
lang) ab- bzw. neu aufzurwickeln.
Zur Verhinderung
des seitlichen Abrutschens des Seiles von der
Trommel wurde
eine Seilführung
eingebaut. Damit scheint dieses Problem
gelöst. Die Endabschaltung durch
den Mikroschalter
funktionierte nicht.
Weiters wurde die Bewegung des Kranarmes über Klemmen
aktiviert. Auch hier waren die Seile
verdrillt und
nach der Entwirrung funktionierte der Kranarm wie er
soll. Die Endabschaltung des
angehobenen Kranarmes
funjktionierte auch nicht. Die meisten Seilrollen drehen sich nicht. Zuletzt
wurde der
Anschluss des Motors für die Kranschwenkung gesucht und
an den weiß markierten
Klemmen gefunden. Er läuft, doch der Kran schwenkt
nicht. Es bleibt zu hoffen, dass das Getriebe
in
Ordnung ist, denn es könnte in den Jahren der Lagerung
durch händische Verdrehungen Scha-
den genommen
haben. Eine Reparatur wäre nur nach aufschneiden des
Decks möglich.
- Aber
vielleicht funktioniert
ohnedies alles, wenn vom
Sender aus gesteuert wird?
Der künftig verwendete
Sender und seine Funktionen
Das Warten auf den Multi-Switch Sender hat sich
gelohnt, der Sender ist eingetroffen und funktio-
niert. Interessant
ist, er besitzt mehrere Module und vor
allem ein wichtiges Multi-Switch-Modul,
welches für die Sonderfunktionen der
Seabex von entscheidender
Bedeutung ist. Wie zu sehen
war, war das Modul nicht angeschlossen.
- Ein zweites Schalter Modul folgte
zum Glück bald nach.
Der
Sender ist für 8 Funktionen ausgebaut und hat derzeit zwei
Schalt-Prop-Module,
bei denen
ein Kanal geschaltet und der zweite
mit dem Hebel zur Servoverstellung verwendet werden
kann.
Weiters ist ein
Differential-Modul und ein
Lehrer-Schüler-Modul
eingebaut.Tatsächlich hat der
Sender wie im
Angebot angegeben, ein
Sendemodul
mit 41mHz, welches es normal nicht gibt.
Infolge des Bedarfs eines zweiten
Multi-Switch-Moduls muss ein Schalt-Prop-Modul
ausgebaut
werden. Der Grund dafür ist, dass
der Sender nur 8 Kanäle (Funktionen) ermöglicht. Davon
sind
vier für die beiden Steuerknüppel
(Kanäle 1-4) und für die beiden Multi-Switch-Module
(Kanal 7
und 8). Es verbleiben für ein Schalt-Prop-Modul
nurmehr die Kanäle 5 und 6.
Das bedeutete, dass eines der
Schalt-Prop-Module ausgebaut werden
musste. Das Differential-
Modul blieb
vorerst ungenützt im Sender und das Lehrer-Schüler-Modul kann ebenfalls
ungenützt,
aber an
anderer Stelle.
Nachdem der Sender mit einem
Akku 9,6V 2000mAh bestückt wurde, konnte geprüft werden, ob
der
40mHz Empfänger meiner Steuerung mit dem Kanal (K 50)
mit dem 41mHz.Sendemodul auch
funktioniert. Ja, das 41mHz-Sendermodul
finktioniert mit dem Kanal 50 ganz normal.
Der
Sender wurde intensiv gereinigt und danach zur
Verbesserung der Erreichbarkeit der diversen
Module, wurde das eingebaute Multi-Switch-Modul vor
den linken Steuerknüppel versetzt und das
neue Multi-Switch-Modul von Gerrit vor den rechten Knüppel.
Oberhalb des
rechten MSM (Multi-Switch-Modul) ist ein
Switch-Prop-Modul (mit einem Drei-Stel-
lungsschalter und einem Hebel für ein proportional
steuerbares Servo) angeordnet und angeschlo-
sen,
es wird aber im Modell derzeit nicht
benötigt. Damit
sind alle 8 verfügbaren Steuerkanäle des
Senders belegt.
Im Sender sind die Knüppelfunktionen der Ruder und die
Fahrtrichtungen (vor-aus-zurück) auf den
ersten vier Kanälen, das Switch-Proportional-Modul auf
dem 5. und 6. Kanal und die beiden MS
Module
belegen die Kanäle 7 und 8.
Die
Schalterfunktionen der Multi-Switch-Module sind:
|
Linkes Modul |
|
Rechtes Modul |
|
|
|
| 5/6: Kran schwenken links - rechts
(gelb) |
|
5/6:
Kranarm heben - senken (gelb) |
| 4:
frei (schwarz) |
|
4:
Kranhaken ab (grün) |
| 3:
Positionslamp-Beleuchtung ( schwarz) |
|
3:
Kranhaken auf (rot) |
| 2:
Hubschrauber Rotor (schwarz) |
|
2:
frei (schwarz) |
| 1:
Wasserpumpe (rot) |
|
1:
Martinshorn (rot) |
Fortsetzung des Berichtes nach dem
Bilderblock.....
|
|
|
|
|
|
 |
 |
 |
 |
|
Versuchs Sender F14 |
Muster-Sender Robbe ProMars |
die kritischen Schaltmodule |
der angekaufte Sender für das Modell |
|
|
 |
 |
 |
|
der fertige Sender für die Seabex One |
Bild vom Aufbau Schottelantriebe |
die neuen Schottel Antriebe am Heck |
die vorhandenen Antriebe am Bug |
 |
 |
 |
 |
|
ursprüngliche
Schottel-Ansteuerung Bug |
Austauschservo mit Spezial Halterung |
Bild nach erstem Servoeinbauversuch |
mit neu angepasste Gestängen |
 |
 |
 |
 |
|
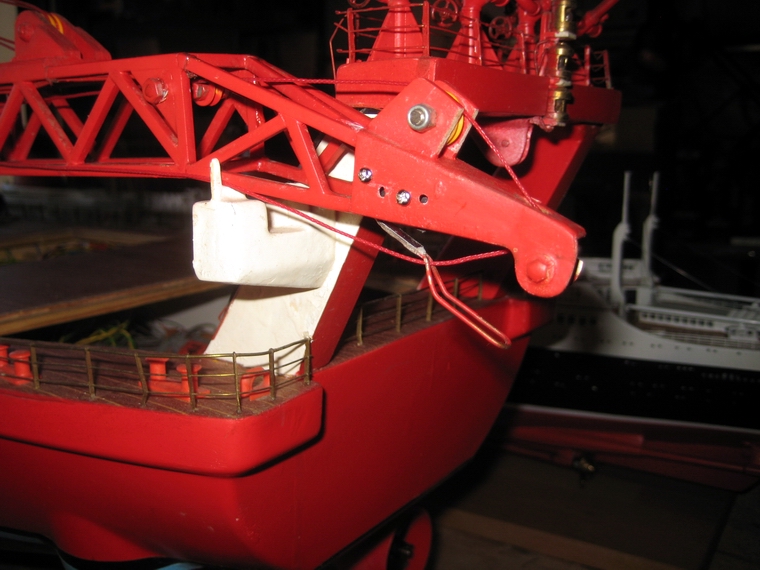
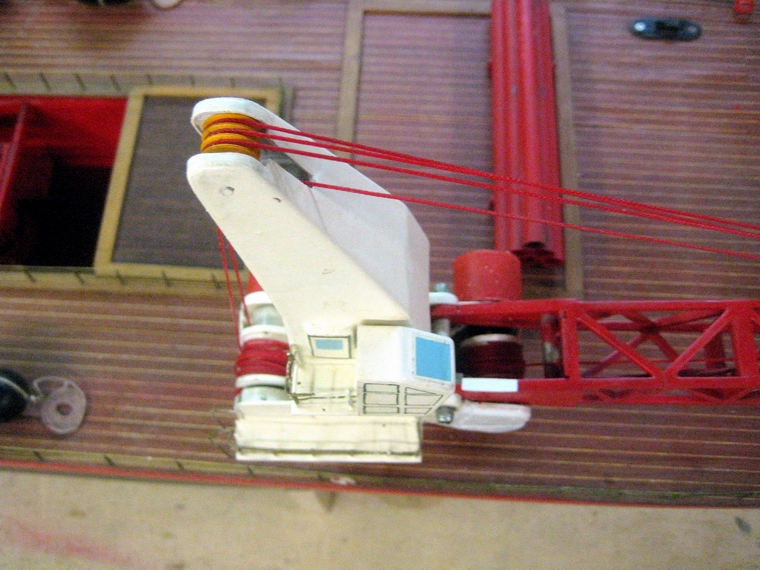
Kranausleger |
Hubseil Trommel |
Ausleger Winde |
Bliock auf Kran (Motorenseite) |
 |
 |
 |
 |
|
Ansicht auf die Winden von oben |
Haken mit gelbem gewicht |
ein Winden-getriebemotor |
Blick auf die Kranwelle |
 |
 |
 |
 |
|
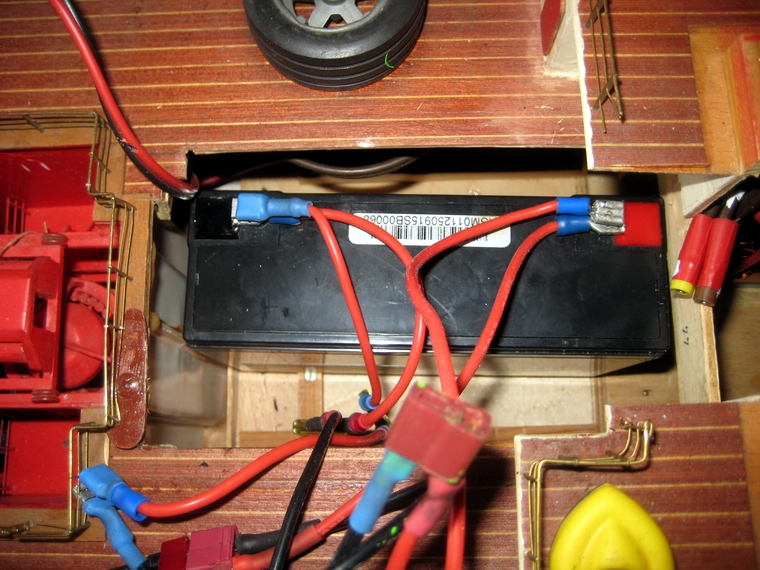
Akkuraum - die Verbraucher-Stecker |
Akkuraum - die Ladestecker/Akkustecker |
Akkuraumabdeckung mit Schlatern und Verschlusshebel |
NEU_ linker Akku |
 |
 |
 |
 |
|
rechter Akku steht im Moment mittig |
Hauptschalter und Stecker für regler |
Blick auf die Regler und die Kurzschlusstelle am Motor |
die neuen Schalter, links Hauptschalter, rechts für
Sonderfunktionen |
 |
 |
 |
 |
|
Ansicht des an der Reling abgestellten Akkuraum Deckels |
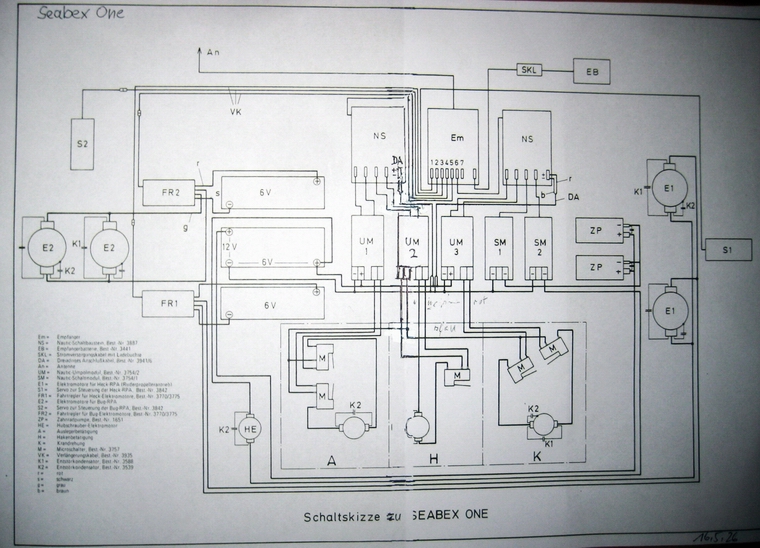
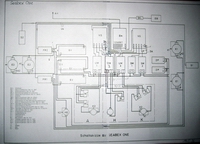
Skizze Schaltung für Anriebe |
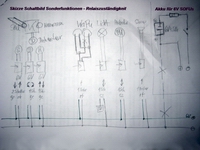
Verdrahtung Sonderfiunktionen im Modell |
Stromversorgung mit Graupner Nautic |
 |
 |
|
|
|
das "Forschungs-U-Boot" |
U-Boot am KLranhaken |
|
|
|
Der
Kran - bis er wieder funktionierte, und dann die Arbeiten am
Aufbau
Um es kurz zu machen, ich
testete mangels Sender die Funktionen des Krans
durch externe Strom-
versorgung. Das
Hubseil funktionierte, auch das Heben und Senken des
Kranarmes. Einzig der
Kran schwenkte nicht,
obwohl der Motor lief. Eine riesiege Sorge kam auf, denn um
zu dem Motor
zu gelangen würde den Ausbau der
Decoder Module mit deren Relais und des Empfängers
bedeu-
ten. Hilfe aus meinem Forum gab es zu
dem Thema leider nicht. Solange der Sender mit den
Schalt-
modulen noch nicht da war, erprobte ich
oft die Sonderfunktionen.
Doch plötzlich funktionierte die
Hubseilwinde nicht mehr,
nachdem sie am Endschalter angelaufen
war. Es schien als gäbe es einen Kurzschluss. Um das
zu erkunden musste die Motorverkleidung
des Windenmotors weg und die
Kabel abgelötet werden. Mit Strom an den Motoranschlüssen
ent-
stand keine Bewegung, also musste der Motor ausgebaut
werden. Das geht nur mitsamt der
Win-
dentrommel und erst nach dem Öffenen der
örtlichen Kran-Seitenwand,
wie man den früheren Spu-
ren nach annehmen konnte.
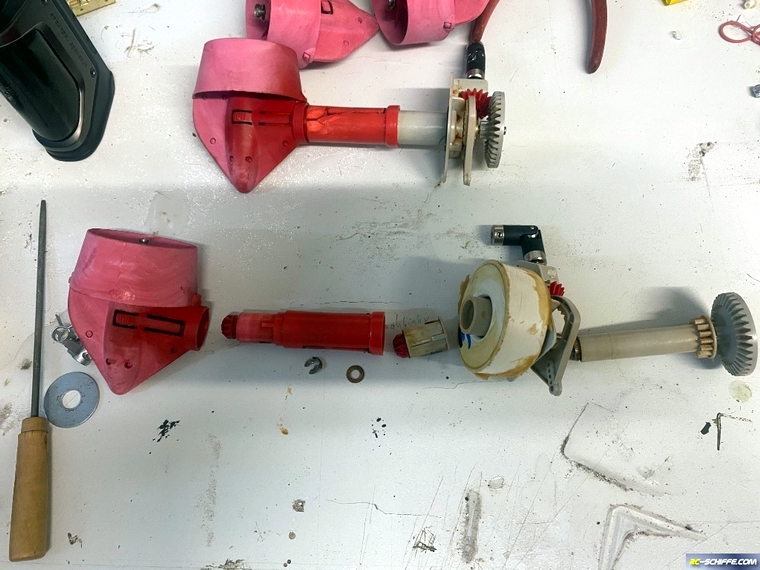
In der Trommel steckt der Motor, ein 6V Micro
Getriebemotor. Wo bekomme ich so einen Motor,
wenn mein Motor defekt ist? Nur
Freund und Helfer Gerrit kannte den Motor, was
alleine auch schon
wertvoll ist. Dann zog ich den Motor aus dem
Getriebe und siehe da, er lief wieder.
Vorsichtig
steckte ich ihn wieder ins Getriebe und das bewegte sich auch
wieder. Freude kam auf
und die Windentrommel
wurde wieder eingebaut und läuft bis heute.
Die
Ursache des Ausfalls des Motors dürfte eine Überlastung
beim Aufwickeln gewesen sein, wo-
durch sich
die Trommel verschoben hatte und der Motor aus dem
Getriebe herausgerutscht ist.
Dann verkantete
und steckte der Motor. Am Bild ist der kleine
Getriebemotor zu sehen. Eine Nach-
beschaffung
scheint nahezu unmöglich!
Die Abschaltung beim
Hochziehen des Hakens mittels des eingebauten
Mikroschalters funktionierte
nicht, denn sie
funktioniert nur, wie sich später zeigte, mit der Verwendung der
Schalter-Module, da
die Verdrahtung mit den
Relais das so vorgibt.
Der Antrieb des
Kranarmes (mit dem gleichen Micro Motor wie bei der
Seiklwinde) war in Ordnung,
doch auch hier war für
die intakte Endabschaltung des angehobenen Kranarmes das Schalter
Mo-
dul notwendig. (Schade, dass es für das
Ablegen des Kranarmes keine Endabschaltung gibt)
Wie sind der Kran und die anderen
Sonderfunktionen zu betätigen?
Der Betrieb des Kranes,
insbesondere des Kranhakenseiles sollte nur in gut einsehbarer
und naher
Entfernung erfolgen. Zur besseren
Sichtbarkeit wurde die Hakenbirne gelb gekennzeichnet.
Achtung: Die
vielen Micro-E-Getriebemotore des Krans sind heute
kaum mehr zu bekommen!
Sie nehmen rasch Schaden, wenn die
baulich vorgegebenen Endpositionen nicht eingehalten
wer-
den. Die Gewichtsbelastung des Krans darf
nicht zu groß sein, das beschädigt die
Windenmotore.
Das Schwenken des
Krans mit dem linken gelben
Drei-Stellungsschalter 5/6 darf
erst nach
dem ausreichend hohen
Anheben des Kranarmes erfolgen und sollte den
Drehwinkel von +/- 90°
nicht wesentlich überschreiten, da
andernfalls Kabelschäden /Kurzschlüsse entstehen können.
Der Schalter in Mittelstellung gestellt hält den Kran
in der eingestellten Position an.
Drückt man
den Schalter nach vorne, schwenkt der Kran vom Schiff
nach außen weg.
(Bevor der
Kran geschwenkt werden darf, muss der Kranarm hoch genug
aufgezogen werden, um
beim Schwenken die
Löschspritzen und den Schwenkantrieb nicht zu beschädigen.
Reparaturen
sind kaum
möglich!)
Der Kranarm wird mit
dem rechten gelben Drei-Stellungsschalter 5/6
auf- und abgesenkt oder
in
stabiler Lage belassen.
Wird der Schalter
nach vorne gedrückt, hebt sich der Kranarm.
Das Ablegen des
Kranarmes auf seiner Ablage ist eine schwierige Aufgabe,
da mit dem Drei-Stel-
lungsschalter nur kurze
Impulse gegeben werden sollten, was schwierig ist. Liegt
der Kranarm auf,
den Schalter
sofort in Mittelstellung lassen, da sonst das Seil lose wird und es
dann zu
Verwicke-
lungen kommt.
Es ist besser den Kran
etwas oberhalb auf der Auflage zu belassen und
ihn
erst am
Ende des Fahr-
betriebes genau in die Ablage zu
steuern.
Der Kranhaken
wird mit dem rechten roten Schalter 3
nicht bis zum Anschlag
hochgezogen. Es
ist
zwar ein Endschalter vorhanden der die Funktion
automatisch beendet, doch ist Vorsicht geboten.
(Es
könnte wie erwähnt im Extremfall zu unreparierbaren
Schaden kommen! - Daher ist empfeh-
lenswert, diese Kranmanöver
nur in der Nähe und bei guter Sicht auf den Kranhaken
durchzuführen)
Mit dem rechten grünen Schalter 4
erfolgt das Abspulen des
Seiles, doch sollte der Endpunkt
nicht überschritten
werden
(ca. 2m Seil), da beim Aufwickeln in
falscher Richtung Wickelprobleme
entstehen. (Tiefer als
auf der Wasseroberfläche ist der Haken
ohnedies nicht sichtbar.)
Die
Wasserpumpen werden mit dem linken roten Schalter
1 auf Länge des Tastendrucks
eingeschaltet.
(Derzeit nur eine Pumpe intakt).
Die Alarmsirene wird mit dem
rechten roten Schalter 1 auf Länge des Tastendrucks einge-
schaltet.
Anmerkung zum Thema Alarmsirene:
Es fällt mir noch ein,
dass alle Sonderfunktionen bei Abfall der
Betriebsspannung im Sender zu
spinnen beginnen und die
Alarmsirene dabei mitwirkt.- Fahrbetrieb sofort
beenden!
Fertigstellung des Aufbaus mit dem Hubschrauber
Landeplatz
Zwischendurch wurde der Hubschrauberplatz
saniert, denn auf der Unterseite waren Klebestellen
bei
einigen Leisten
gebrochen. Auch die Sicherheitsgitter mussten
ausgebessert
werden. Sollten
sie optisch besser aussehen,
müssten sie alle neu angefretigt werden. Die Ausbesserungen
der
Klebestellen erfolgte beidseitig nach
Vorspannung des Landedecks und nachfolgender Klebung.
Danach war die Optik besser geworden.
Der vorne am Landedeck befindliche Lichtmast war einst beim Transport gebrochen und musste
dafür eine neue
Befestigung gefunden werden. -
Um
den Lichtmast künftig vor Bruch zu schützen,
wurde er
herausziehbar gemacht, um ihn beim Transport vor
Schaden zu schützen.
Dazu wurde
das Kabel der Stromversorgung
verlängert und eine Halterung für den
herausgezogenen Mast an-
gefertigt. - Der Mast kann
nach dem Umlegen unter den etwas hochgehobenen
Hubschrauber
gelegt werden.
Im Aufbau
mussten Lampen versetzt werden, damit die Kabelstränge
zusammengezogen werden
konnten, wodurch die
Abnahme und das Aufsetzen des Aufbaus erleichtert wird.
Es gibt drei Kabel-
stränge für a) den
Lautsprecher der Sirene, b) die gesamte Beleuchtung und
c) für
den Hubschrauber.
Der Akkuschacht und der
Umgang mit den Akkus
Im Modell
kommen vier Bleiakkus zur Verwendung. Zwei parallel
geschaltete große 6V 12Ah
Akkus
für beide Schottelgruppen, ein 6V 4,5Ah
Akku für die Sonderfunktionen und für die Beleuchtung
ein
4V 4,5Ah Akku.
Nach den Anschlüssen der
Kabel an den Akkus werden sie im Rumpf
untergebacht. Die zwei
großen Akkus werden im Schiff in
den seitlich auf dafür am Boden vorgesehenen
Flächen aufge-
stellt. Der kleine Akku wird mittig
zwischen den großen Akkus in umgelegter Lage
untergebracht
(aufgestellt
Kurzschlussgefahr!!!) und der Beleuchtungs Akku ist im
Schacht vor der Elektronik.
Nach einem schlimmen
Kurzschluss wurde die Verdrahtung wie folgt abgeändert:
Ursprünglich war jeder große Akku über einen
Schaltkontakt eines zweipoligen Schiebeschalters
mit
einem Regler und der Motorgruppe verbunden.
Infolge des aufgestellt stehenden kleine SOFU
Akkus kam
es nach dem Auflegen des Schachtdeckels am
zweipoligen Schiebeschalter zu einem
argen Kurzschluss
der sogar die SOFU lahm legte. - Daher wurde die
Verdahtung neu aufgebaut.
Neu:
Die
Antriebsakkus und der SOFU-Akku
sind getrennt von einander, jeder mit dem Schalter über
eine KFZ- Flach-Sicherung
(Antrieb 15A, SOFU 5A)
in der Minus-Leitung verbunden. Nach dem
Schalter gelangt der Strom zu den Verbrauchern.
In der
Verbindungsleitung der Minus Pole zur
Parallelschaltung der großen Akkus befindet sich eine
15A KFZ-Sicherung.
Die Plus Pole
der Akkus sind auch miteinander verbunden.
Von
den Schaltern laufen die Minus-Leitungen und von den
Plus Polen die Plus-Leitungen zu
den
Verbrauchern.
Beide parallel
geschalteten Akkus haben einen Ladestecker. Die Ladung der großen Akkus erfolgt
also nur durch einen
einzigen Ladestecker.
Der Akku für die SOFUs muss immer liegen,
da aufgestellt mit den vielen Kabeln der Platz zu
den Schalteranschlüssen zu klein ist und daher
Kurzschlussgefahr besteht!
Auf
dem Deckel des Akkuschachts befindet sich hinter
dem großen Stapel der Hauptschalter,
daneben
der Schalter für die Sonderfunktionen. - Da
die Kabel etwas steif sind, muss der Deckel
mit
einem Riegel gehalten werden.
Vorbereitungen für den
ersten Fahrbetrieb
Das Modell wurde im Pool
ausgewogen und ein mehrminütiger Lauftest zur Prüfung
der Antriebe
und der Dichtheit durchgeführt. Dabei
wurde auch die Funktion die Steuerung des Modells und
die
Auswirkungen der Steuerbefehle erprobt.
Der Rumpf ohne Aufbau schwamm in ziemlich ausgewogener
Form. Einschaltung der Schottel-An-
tirebe ließen
keinen Wassereintritt erkennen. Mit dem Aufbau zeigte
sich ein erhebliche Seitenbe-
lastung die mit 600g Blei ausgeglichen werden musste. Die Bleiplatten
wurden am Deck aufgelegt.
Es war zu sehen, dass
das Rumpfheck tiefer ins Wasser muss, was durch Zuladung
im hinteren
Batterieschachtdurch einen
Bleiakku erfolgen kann.
Ansonsten müssen die Gewichte im Heckbe-
reich
untergebracht werden, was noch Nachdenken
erforderte.
Die ersten Fahrversuche waren überraschend, denn die zu
knapp unter Wasser befindlichen Heck-
antriebe
funktionierten trotzdem gut und man kann damit das
Schiff am Ort drehen. Die Bugan-
triebe
ermöglichen ebenfalls hohe Wendigkeit.
Das
Steuern beider Antriebe für die Seitenbewegung des
Modells bedurfte der vorherigen Überle-
gung, welcher Antrieb
in welche Richtung wirken muss und in welcher Intensität
die Drehzahlen der
Antriebe erfolgen muss, um eine
genaue Parallelbewegung zu erreichen. - Darüber hinaus
muss
die Ruderwirkung mit viel Gefühl
ausgeübt werden, das sonst das Modell erhebliche "Ecken"
fährt
und krängt.
Bei den Nacharbeiten wurde der Kran unbewußt angehoben,
wodurch immer ein Problem mit der
Verwicklung
der Seile folgt. Nach dem neuerlichen Einfädeln der
Seile ist alles in Ordnung.
Chaos bei der Fertigstellung - Kurzschluss mit
Folgen
Nachdem alles nach der ersten Waaserung fertig war (!), wurde der Akkuschacht Deckel
geschlos-
sen und vetrriegelt. Plötzlich begann
es aus dem Lüftungsspalt des Schachtes stark zu qualmen.
Rasch wurde der Deckel entfernt und
brennende Kabelverbindungen getrennt. Nach dem
Rauchab-
zug war zum Glück kein anderer Schaden
zu erkennen. Nach der wie oben beschriebenen Repara-
tur der Verkabelung war
sofort ein
Schaden an einem Fahrtregler zu bemerken - schlimmer noch -,
die Sonderfunktionen funktionieren
nicht mehr. - Der sofort überprüfte Empfänger
zeigte jedoch
keinen Schaden.
Mit großem Schreck
war zu sehen, dass alle Sonderfunktionen ausgefallen
sind. Das ist ein Chaos,
denn wenn die Module
oder die Relais defekt sind, ist Ersatz nur schwer und
zeitraubend möglich.
Daraufhin wurde überprüft
ob die Leitungen vom Akku bis zur Elektronikplatte
durchleitend sind.
Ja, es wurden sogar mehrere
Klemmen gefunden, von denen eine Kontakt bis zum Akku
bestand.
Mit dem Voltmeter wurden alle Klemmen
überprüft wo die Stromführend sind. Doch es kam zu keiner
Feststellung,
dass ein Schaden vorliegt.
Dann kam ich auf die Idee, die Decoder aus einem
externen 5zeller NiMh Akku zu versorgen, um zu
erkennen
ob sie arbeiten. Siehe da
die Relais klickten wieder,doch bewegt hat sich aber nichts.
Einzig war zu sehen, dass
das Licht-Relais
anspricht und mit der LiFePo-Zelle das Hecklicht
brannte. Auch die Wasser-
pumpen liefen (doch
wegen eines Schadens an einem Anshluss wurde eine Pumpe
abgeschaltet).
Die wichtigen Kranfunktionen
blieben noch ohne Bewegung und auch der Hubschrauber Rotor
stand
still.
Nun wurde klar
ersichtlich, dass die Stromzufuhr zu den 6V
Sonderfunktionen unterbrochen ist.
Jetzt engte sich der Kreis des Fehlers ein, doch
wo genau liegt er? Die von mir angefertigten Skiz-
zen machten
mir die Stromversorgung
überschaubar, sodass es nur an einem fehlenden
Minus-
Kabelanschluss an einer wichtigen Klemme liegen
konnte. Das
bestätigten auch die Durchgangs-
prüfungen. In
der Folge wurde
ein neues Kabel eingezogen. Die anfangs noch mit dem
Extern-Akku
versorgten Decoder konnten nun mit der
neuen Kabelverbindung alle Sonderfunktionen
zum Leben
erwecken. Lediglich die Wasserpumpe
stand jetzt still, da auch sie jetzt auch einen Masseanschlus
brauchte.
Zuletzt wurden die Decoderkabel Stromkabel wieder an den
zugehörigen Klemmen ange-
schlossen und danach funktionierten
alle Sonderfunktionen wie sie sollen.
Offenbar
hat der Kabelbrand an einer nicht einsehbaren Stelle zu
einer Kabelunterbrechung geführt!
Gott sei Dank konnte
ich den Fehler beheben.
Vor Freude kaufte ich ein Mini U Boot, welches mit dem
Kran gehoben und Ortsverändert werden
kann. Das
EInhaken des Kranhakens stellte sich als schwierige
Aufgabe dar. Am schwimmenden
Schiff scheint
das Absetzen des U.Bootes möglich, das Aufnehmen aus dem
Wasser ist mehr als
ein Glücklspiel.
Die zweite Auswiegung des Modells und ein Fahrtest
Um das nun mit den ersten Bleizugaben und allen Akkus
bestückte Modell für den Fahrbetrieb zu trim-
men
musste es nochmals ins Wasser. Um das schwere Modell
über die Slipbahn der alten Werft zu
Wasser zu
bringen, musste ein Transportwagen angeschafft und für
den Zweck adaptiert werden. Die
Beschreibung
dazu ist vai den Link
Slipwagen zu sehen.
Mühsam und mit Hilfe des Bekannten Tom konnte das
Modell mit dem Slipwagen zum Wasser trans-
portiert
werden. Dabei musste der Wagen so weit ins Wasser
geschoben werden, bís das Modell auf-
schwamm.
Danach wurde mit Bleigewichten versucht, die Wasserlinie
zu erreichen. im Heckteil
mussten gut 300g auf
Seite des Krans nachgegeben werden. Die nachfolgende
Fahrt ließ erkennen,
dass noch etwas mehr Blei
auf dieser Seite gebraucht wird. Zu sehen war auch, dass
die im Bug unter-
gebrachte Bleimenge halbiert
werden muss.
Die Fahrversuche waren eigenartig
für mich, da die Heckantriebe eher schwach wirkten. Im
Gegensatz
schienen die Bugantriebe mehr Fahrt
zu erzeugen.
Da das Boot von Tom plötzlich nichtmehr fuhr, war ein
Rettungseinsatz fällig geworden. Um rasch zum
liegen
gebliebenen Schiff zu kommen wurde volle Kraftz voraus
gesteuert . Dabei fielen die Heckan-
triebe aus
und arbeiteten nurmehr bei langsamer Fahrteinstellung.
Es gelang das Modell zum Ufer zu
bugsieren.
Ausfallursache: Senderakku leer. Das Torpedoboot von Tom
fuhr ansonsten zügig und gab
ein interessantes
Fahrbild ab.
Nach einigen Seitenfahrversuchen und Drehungen
wurden die Sonderfunktionen Löschkanonen und
Kran
erprobt und sie funktionierten einwandfrei. Die gesamte
Fahrzeit betrug mehr als 30 Minuten.
Fahrvideo
vom Hafen
Das Bergen der Seabex
gestaltete sich spannend, denn mehrere Anfahrversuche
verfehlten den Slip-
wagen, denn es war nicht
möglich 3m weit im Wasser stehend den Sender abzulegen.
Das Modell
wurde schließlich händisch am
Slipwagen aufgelegt und abtransportiert.
Vor dem EInräumen in Auto wurde nachgesehen, ob Wasser
eingedrungen ist. Es war kein Wasser
zu entdecken
und so wurde klar, dass die nachträgliche Abdichtung des
Deckels des Moon Pools ge-
wirkt hat.
Bei den
Heckantrieben war zu bemerken, dass bei höherer Drehzahl
das Tellerzahnrad bei den
Antrieben außer
Eingriff kommt. Um das zu verbessern müssen die
Antriebseinheiten mit den
Propellern nach oben
gedrückt werden und Gegendruck auf den Tellerrädern
erfolgen. Es scheint als
sind die Heckantriebe nicht
optimal eingebaut worden. Das große Spiel verursacht
durch schlechten
Zahnradeingriff an den der Heckantriebenverursacht das
laute Laufgeräusch. Die Montage eines das
Axialspiel
verringernden Distanzringes wurde versucht, wegen
ungewisser Langzeitwirkung aber weg-
gelassen.
Ansonsten ist das Modell für Fahrten jetzt einsatzbereit und
die Sonderfunktionen können im Nahbe-
reich eine
nette Ergänzung zum Fahrbetrieb sein. - Schwierig war
für mich der Transport des Modells
vom Auto
zum Wasser. Vielleicht fällt das meinem Freund Franz,
dem Besitzer, leichter.
|
|
|
|
|
|
|
|
|